Un capteur de proximité infrarouge est un dispositif qui détecte la présence d'un objet ou d'un être humain lorsqu'il se trouve dans une plage prédéterminée du capteur, à travers des faisceaux infrarouges réfléchis.
Trois concepts de capteurs de proximité utiles sont expliqués ici, le premier concept est basé sur un amplificateur opérationnel ordinaire LM358, le second utilisant IC LM567 qui fonctionne avec un principe de boucle à verrouillage de phase assurant une réponse très précise pour la détection. Le troisième circuit fonctionne en utilisant l'omniprésent IC 555. Apprenons chacun d'eux avec une explication étape par étape.
Aperçu
Il y a un longue liste de capteurs qui sont disponibles sur le marché aujourd'hui.
Un de ces capteurs est le capteur de proximité.
Dans cet article, nous sommes sur le point de démêler le fonctionnement d'un capteur de proximité et ce qui apporte les connaissances nécessaires pour réaliser ce projet chez soi. Comme son nom l'indique, l'appareil détecte si un objet est proche ou éloigné. Ils peuvent être conçus de différentes manières.
Mais, la méthode la plus courante est celle basé sur les rayons INFRAROUGES et OPAMP. Certaines utilisations courantes de cet appareil peuvent être observées dans les téléphones portables, les systèmes de rinçage automatique, les robinets automatiques, les sèche-mains et les robots qui ne tombent jamais.
Composants requis
1. LED IR : Chaque LED émet une forme de rayonnement électromagnétique lorsqu'elle est sous tension. De notre expérience domestique, nous avons connu des LED qui émettent de la lumière visible.
Mais, il existe également des LED spéciales qui émettent des rayons infrarouges. Tout comme il peut y avoir des LED visibles de différentes couleurs, les LED IR émettent également des rayons de différentes longueurs d'onde. Les rayons infrarouges peuvent être de longueurs d'onde variables et peuvent prendre n'importe quelle valeur appartenant à leur bande d'onde.
Il est donc très important que la photodiode IR utilisée soit capable de détecter la longueur d'onde particulière d'INFRA RED émise par la led IR.

deux. PHOTODIODE IR : C'est un type spécial de diode qui est connecté en polarisation inverse pour la détection des rayons IR . En l'absence de rayonnement IR, il a une résistance très élevée et un courant pratiquement nul le traverse.
Mais lorsque les rayons IR lui tombent dessus, sa résistance diminue et un courant proportionnel à l'intensité du rayonnement est autorisé à le traverser.
Cette propriété de la photodiode est utilisée pour générer un signal électrique dans le capteur de proximité sur l'incidence des rayons IR.

3. Amplificateur opérationnel (IC LM358) : L'amplificateur opérationnel ou amplificateur opérationnel est un ic polyvalent et est très vénéré dans le monde de l'électronique.
Dans ce projet, op-amp est utilisé comme comparateur. LM358 IC a deux amplificateurs opérationnels, ce qui signifie que nous pouvons créer deux détecteurs de proximité en utilisant un seul IC. La raison d'utiliser un ampli-op dans le circuit est de convertir le signal analogique en signal numérique.


Quatre. Préréglage : Preset est essentiellement une résistance à trois bornes.
La fonction d'un préréglage est de diviser la tension totale disponible de manière à ce que l'utilisateur puisse accéder à une fraction de celle-ci. Il suffit de régler le terminal du milieu sur une position appropriée.
Le préréglage définit la tension de seuil au-dessus de laquelle la tension de sortie doit être générée. Il peut être réglé manuellement sur une résistance de n'importe quelle valeur en tournant sa tête à l'aide d'un tournevis approprié.

5. LED rouge : J'ai utilisé une led rouge pour mon projet mais en général une led de n'importe quelle couleur peut être utilisée. Il agit comme un signal visuel pour montrer que l'obstacle s'est suffisamment rapproché.

6. Résistances : Deux 220 ohms et un 10k ohms.
7. Source de courant : 5 v à 6v.
Comment ça marche
Le principe derrière le fonctionnement d'un capteur de proximité est assez simple. Un concept typique a deux LED parallèles l'une à l'autre - une LED émettrice d'IR et une photodiode.
Ils agissent comme une paire émetteur-récepteur. Lorsqu'un obstacle vient devant des rayons émetteurs, ils sont réfléchis et interceptés par le récepteur.
Selon les propriétés de la photodiode, les rayons IR interceptés diminuent la résistance de la photodiode et le signal électrique résultant est généré. Ce signal en pratique est la tension aux bornes de la résistance de 10k qui est directement appliquée à l'extrémité non inverseuse de l'amplificateur opérationnel.

La fonction de l'ampli-op est de comparer les deux entrées qui lui sont données.
Le signal de la photodiode est donné à la broche non inverseuse (broche 3) et la tension de seuil du potentiomètre est donnée à la broche inverseuse (broche 2) .Si la tension à la broche non inverseuse est supérieure à la tension à la inverser la broche la sortie de l'ampli-op est élevée sinon la sortie est faible.
Dans l'ensemble, l'ampli-op convertit le signal analogique en signal numérique dans ce circuit.
LES SORTIES:
La sortie du capteur peut être utilisée sous deux formes: ANALOGIQUE et NUMÉRIQUE.
La sortie numérique est sous la forme soit de haut soit de bas. Le signal de sortie numérique d'un capteur de proximité peut être utilisé pour arrêter le mouvement d'un robot évitant les obstacles. Dès que l'obstacle se rapproche suffisamment, le signal peut être directement transmis aux broches d'entrée du pilote de moteur pour arrêter les moteurs.
La sortie analogique est une plage continue de valeurs allant de zéro à une valeur finie. Un tel signal ne peut pas être transmis directement aux pilotes de moteur et autres dispositifs de commutation. Tout d'abord, ils doivent être traités par les microcontrôleurs et convertis en forme numérique via ADC et un certain codage. Cette forme de sortie nécessite un microcontrôleur supplémentaire mais élimine l'utilisation de l'ampli-op.
Circuit complet Digaram

MISE À JOUR de Administrateur
La conception de circuit ci-dessus pourrait également être construite en utilisant un seul opamp IC 741 ordinaire, comme indiqué ci-dessous:

Clip vidéo
2) Circuit de détecteur de proximité précis (immunisé à la lumière du soleil)
Le post suivant explique un circuit de détecteur de proximité infrarouge (IR) précis qui intègre l'IC LM567 pour assurer des opérations fiables et infaillibles. Ce circuit est insensible à la lumière du soleil ou à toute autre lumière ambiante et ne sera pas affecté tant que les signaux réfléchis accordés ne seront pas reçus par le capteur. La conception fonctionne également comme un détecteur d'obstacles.
Le concept de circuit
J'ai trouvé cette conception sur le net en cherchant un circuit de capteur de proximité précis et fiable mais bon marché.
Le circuit peut être compris à l'aide de la description suivante:
En se référant au circuit de détecteur de mouvement infrarouge (IR) illustré ci-dessous, nous voyons la conception se composant de deux étages principaux, l'un impliquant l'IC LM567 tandis que l'autre avec l'IC555.
Fondamentalement, le IC LM567 devient le cœur du circuit qui remplit uniquement les fonctions de génération / émission de la fréquence IR et également de détection de celle-ci.
De plus, le circuit intégré possède un circuit de boucle à verrouillage de phase interne qui le rend très fiable avec les applications de circuit de détection de fréquence.
Cela signifie qu'une fois qu'il lit et se verrouille à une fréquence donnée, sa fonction de détection se verrouille sur cette fréquence et par conséquent, toute autre perturbation parasite, quelle que soit sa puissance, n'influence ni ne perturbe son fonctionnement.
Fonctionnement du circuit
Une fréquence d'oscillateur interne déterminée par R3, C2 alimente la diode IR D274 via un étage commandé en courant constitué de T1, R2. Cette fréquence décide de la fréquence centrale de la puce.
Avec les conditions ci-dessus, le circuit intégré est réglé et centré à la fréquence ci-dessus, générant une constante élevée à sa broche de sortie # 8.
La broche d'entrée n ° 3 du CI attend de recevoir une fréquence qui peut être exactement égale à la fréquence «centrée» ci-dessus du CI.
Le récepteur IR ou le capteur connecté sur la broche n ° 3 du CI est positionné exactement à cet effet.
Dès que le faisceau infrarouge du LD274 trouve un obstacle, son faisceau est réfléchi et tombe sur la diode de détection BP104 correctement positionnée.
La fréquence IR du LD274 passe maintenant à la broche d'entrée n ° 3 du circuit intégré, puisque cette fréquence sera exactement la même que la fréquence centrale définie du circuit intégré, le circuit intégré le reconnaît et commute instantanément sa sortie de haut en bas.
Le déclencheur bas ci-dessus à la broche n ° 2 de l'IC 555 qui est configuré comme monostable à son tour commute sa sortie au niveau haut, provoquant le déclenchement de l'alarme connectée.
La condition ci-dessus persiste aussi longtemps que l'interruption du capteur / détecteur IR reste et permet aux faisceaux d'être réfléchis. Avec l'inclusion de R9 et C5, la sortie de IC555 présente une certaine condition d'arrêt de retard pour le buzzer connecté même après que le mouvement ou l'obstacle se soit éloigné.
Pour régler l'effet de retard, R9 et C5 peuvent être modifiés selon vos préférences.
Le circuit expliqué ci-dessus peut également être utilisé comme circuit détecteur de proximité et circuit détecteur d'obstacle.
Schéma

Circuit d'essai
Le circuit de test suivant montre comment vérifier les résultats d'une conception de base LM567 IR. Le schéma peut être vu ci-dessous:

Comme vous pouvez le voir, seule la platine LM567 est intégrée à la conception tandis que la platine IC 555 a été supprimée afin de simplifier les procédures de test fondamentales.
Ici, la LED rouge à la broche n ° 8 de l'IC s'allume et reste allumée tant que les LED IR sont maintenues parallèles les unes aux autres à une distance de 1 pied.
Si vous essayez de remplacer la LED rouge de l'émetteur infrarouge Tx par une autre source externe ayant une fréquence différente, le LM567 arrête de détecter les signaux et la LED rouge cesse de s'allumer.
Les photodiodes ne sont pas cruciales, vous pouvez utiliser des photodiodes similaires ou standard pour les LED de l'émetteur et du récepteur.
Clip vidéo pour la configuration de test ci-dessus:
3) Une autre conception de capteur de proximité basée sur IC 567
Tout comme ci-dessus, la caractéristique exceptionnelle de ce circuit est qu'il ne peut pas être activé ou secoué par un rayonnement IR direct, mais seul le rayonnement IR réfléchi frappant le détecteur déclenchera le circuit.


Au centre du circuit se trouve un IC de décodeur de tonalité 567 solitaire (U1) qui exécute une double fonctionnalité: il fonctionne à la fois en tant que pilote d'émetteur IR de base et en tant que récepteur. Le condensateur C1 et la résistance R2 sont utilisés pour fixer la fréquence de l'oscillateur interne de U1 à environ 1 kHz.
La sortie d'onde carrée de U1 à la broche 5 est appliquée sur la base Q1. Le transistor Q1 est configuré comme un amplificateur émetteur-suiveur, qui connecte une impulsion de 20 mA sur l'anode LED2.
Le transistor Q3 capte la sortie IR de LED2 et dirige la transmission vers Q2 pour plus d'amplification. Après l'amplification par Q2, le signal est renvoyé à l'entrée de U1 à la broche 3, déclenchant la broche 8 pour devenir faible, allumant la LED1.
Si nécessaire, LED1 peut être remplacé par un optocoupleur pour basculer pratiquement n'importe quelle charge alimentée en courant alternatif. Parce que le circuit est très simple, presque tous les plans de conception fonctionneront.
L'émetteur IR (LED1) et le phototransistor (03) doivent être installés à environ pouces séparés dans un placement côte à côte et focalisés exactement sur la même piste.
Il peut être nécessaire de tester l'espacement et le point de vue de l'installation d'une paire de dispositifs IR pour déterminer la position parfaite pour toute plage assignée entre le détecteur et l'émetteur.
En règle générale, un écart de pouce entre la paire émetteur / détecteur infrarouge permet au circuit de proximité de découvrir une cible distante d'environ un demi à un pouce. Les cibles ombrées plus claires reflètent beaucoup mieux et peuvent fonctionner à des distances plus importantes que celles créées à partir d'éléments plus profonds. Tant que le capteur de proximité capte les signaux IR accordés, le circuit commandé continue à être activé, et dès que le signal disparaît, la sortie s'éteint.
4) Détecteur de proximité utilisant le circuit IC 555
Dans cette troisième conception, nous discutons d'un simple circuit de détecteur de proximité basé sur IC 555 qui peut être utilisé pour détecter les intrusions humaines à distance.
Fonctionnement du circuit
Un détecteur de proximité infrarouge peut être considéré comme l'un des circuits les plus précieux et les plus largement utilisés dans le domaine des applications d'automatisation électronique.
Nous pouvons généralement le voir utilisé dans les distributeurs d'eau automatiques, les sèche-mains automatiques et certaines variantes spécifiques peuvent être observées dans les portes automatiques des grands magasins.
Principe de fonctionnement du circuit de détecteur de proximité proposé utilisant IC 555
Dans la conception, une génération de salves rapides d'impulsions de tension de crête à partir de l'IC LM555 est mise en œuvre à une fréquence de fréquence relativement inférieure, qui est transmise via la LED infrarouge sous forme de jets de faisceaux IR.
Ces impulsions transmises sont focalisées vers la zone qui doit être surveillée, et sont réfléchies lorsqu'un sujet ou un intrus est détecté sur une diode phototransistor positionnée stratégiquement pour recevoir ces signaux réfléchis.
Une fois que cela se produit, les signaux reçus passent par un traitement afin de permettre à un mécanisme de relais attaché et ultérieurement à un dispositif d'alarme de s'activer.
Pour tester la mise en œuvre ci-dessus, un objet peut être introduit à travers la zone des faisceaux infrarouges et la réponse peut être vérifiée en surveillant le fonctionnement du relais, par exemple en déplaçant la main dans la zone focalisée, à une distance d'environ 1 mètre.
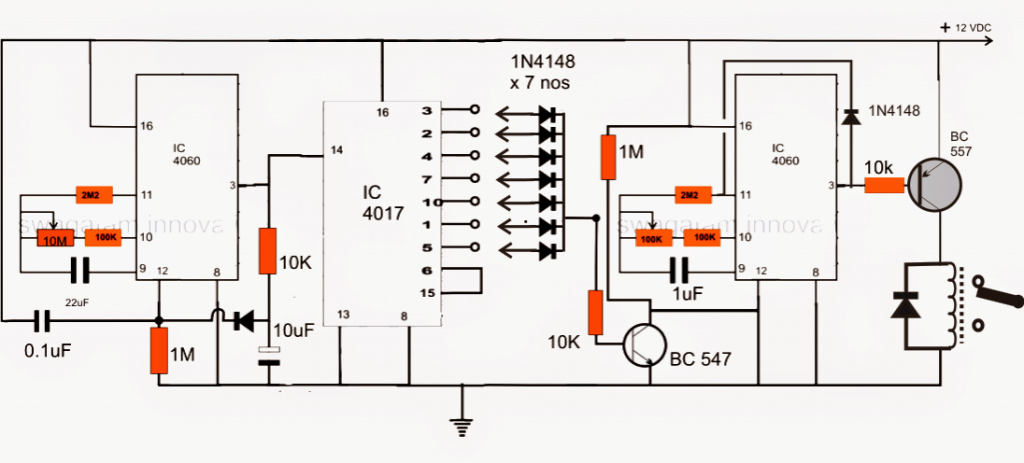
Lorsque les signaux réfléchis frappent le phototransistor, il développe une différence de potentiel à travers le pot 1M (réglable) et déclenche l'étage Darlington associé, qui à son tour active l'étage 555 du côté droit configuré comme un circuit monostable.
Le relais est activé en réponse à cela et reste allumé en fonction de la temporisation prédéterminée monostable définie par le condensateur 1M et 10uF.
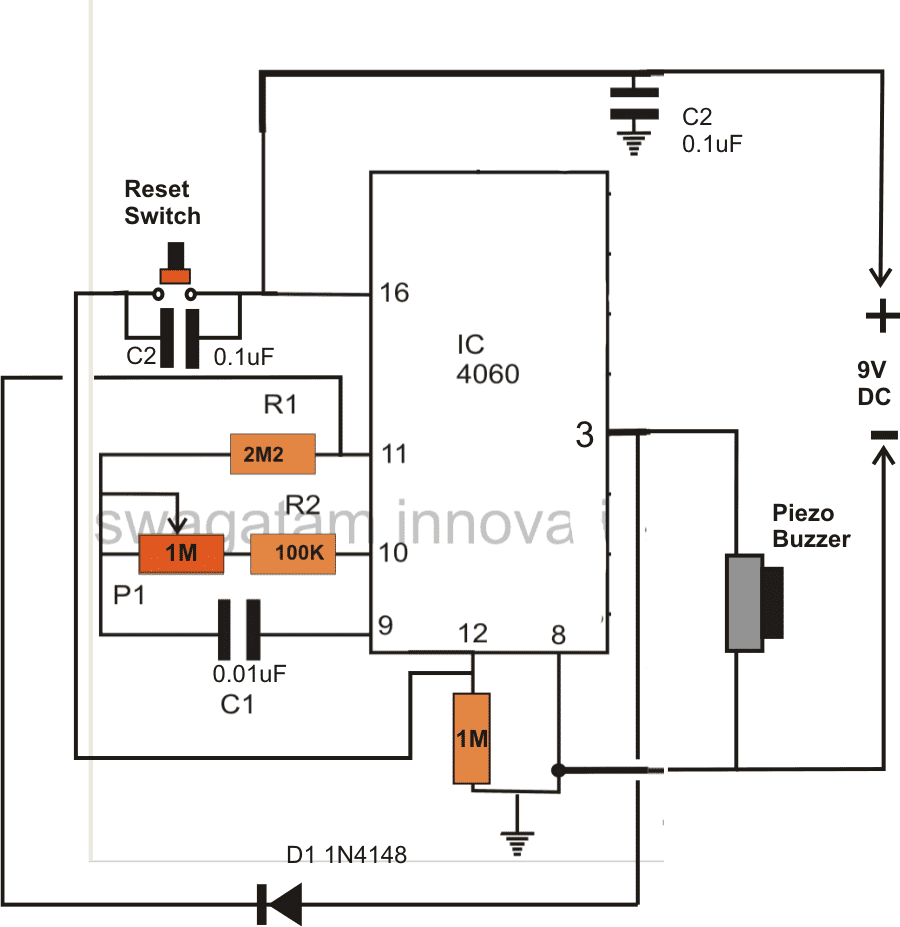
Schéma

Liste des pièces du circuit de détecteur de proximité IR basé sur IC 555 proposé.
2 - IC LM 555
2 - prises IC 8 broches
1-- relais 12 V 5 broches
1 - Phototransistor infrarouge à usage général

1-- Diode infrarouge à usage général
3 - BC547
2-- condensateurs. 10 uF / 50 V
1 à diode 1N4148
1-- led rouge 5mm
1 à 68 H
1 à 1K5
2 à 10 km
1 à 100 000
1 à 470 R H Tous 1/2 W
1 - Résistance 10k 1/4 W à connecter entre le fil central préréglé 1M et la paire BC547
Brochage IC 555

Précédent: Faire ce convertisseur Buck en utilisant Arduino Un article: Contrôleur de pompe basé sur SMS avec arrêt automatique de la marche à sec