Dans cette ère de l'automatisation industrielle , les robots sont utilisés pour gérer divers processus pour une production précise et de meilleure qualité. Choisir le moteur idéal pour un robot parfait est toujours une tâche difficile lors de la conception du robot en particulier pour les industries. Une bonne sélection de moteurs électriques dans les robots industriels nécessite plusieurs paramètres pour prendre en compte le contrôle du bras, la position, les mouvements angulaires et linéaires.

Moteurs utilisés en robotique industrielle
Le choix du moteur est le concept le moins compris pour les amateurs de robotique qui nécessitent une stratégie et une analyse sérieuse.Il implique la détermination de la vitesse du robot, de l'accélération, des exigences de couple en fonction du poids du robot, de la taille de la roue et de l'application où il doit être implémenté.Il existe de nombreux types de moteurs sont disponibles sur le marché actuel, mais principalement des moteurs de téléavertisseurs minuscules, servomoteurs , moteurs linéaires, moteurs pas à pas et les motoréducteurs à courant continu sont utilisés dans les robots industriels en fonction de leur domaine d'application.
Une mauvaise sélection de moteur aboutit à un robot handicapé, alors quel type de moteur est le mieux adapté pour rendre les robots industriels réels, précis et suffisants pour répondre à tous les besoins des processus industriels tout en gardant à l'esprit toutes les spécifications réalistes?
Nous avons rassemblé ici quelques aperçus de ces moteurs de professionnels de l'industrie pour choisir le moteur correspondant à sélectionner pour les applications industrielles.
Nous vous encourageons à suivre les avis des experts qui visent à fournir les meilleurs moteurs pour la robotique industrielle avec des moteurs CC, pas à pas, sans balais et servo disponibles pour des mouvements précis, rentables et fiables du robot.
Ch.Sampath Kumar
M.tech dans la conception VLSI
Rédacteur de contenu technique
 Les moteurs à courant continu sont disponibles dans de larges plages pour un fonctionnement continu, mais cela nécessite des réductions de vitesse pour s'adapter à l'application correspondante. Le moteur pas à pas ne nécessite aucune réduction d'engrenage car son fonctionnement pas à pas fournit une faible vitesse pour les applications spécifiées. Enfin, les servomoteurs sont utilisés pour un contrôle précis et précis qui est mis en œuvre dans des opérations en boucle fermée. Mais il nécessite un retour supplémentaire et des circuits de commande, il est donc coûteux que le moteur CC et pas à pas. Ainsi, les servomoteurs rendent le robot plus fiable grâce à son mouvement précis.
Les moteurs à courant continu sont disponibles dans de larges plages pour un fonctionnement continu, mais cela nécessite des réductions de vitesse pour s'adapter à l'application correspondante. Le moteur pas à pas ne nécessite aucune réduction d'engrenage car son fonctionnement pas à pas fournit une faible vitesse pour les applications spécifiées. Enfin, les servomoteurs sont utilisés pour un contrôle précis et précis qui est mis en œuvre dans des opérations en boucle fermée. Mais il nécessite un retour supplémentaire et des circuits de commande, il est donc coûteux que le moteur CC et pas à pas. Ainsi, les servomoteurs rendent le robot plus fiable grâce à son mouvement précis.
Viswanath Prathap
M.Tech en génie électrique
Rédacteur de contenu technique

Pick and place Les robots se trouvent généralement dans les industries pour choisir un objet dans une position ou un endroit et pour le placer à une autre position ou à un autre endroit. A cet effet, les mouvements angulaires des articulations des robots doivent être contrôlés, ce qui peut être réalisé à l'aide de servomoteurs. Ces servomoteurs sont contrôlés à l'aide des données PWM fournies par le contrôleur robotique pour actionner les articulations des robots. Les servomoteurs sont capables de générer un couple suffisant pour déplacer rapidement un objet de la position d'arrêt. Ainsi, ceux-ci sont utilisés comme roues dans les véhicules robotiques militaires et industriels. Des moteurs pas à pas peuvent également être utilisés pour contrôler la position, mais ceux-ci consommeront de l'énergie même pendant la période de repos pour simplement verrouiller et maintenir la position commandée. Ainsi, les servomoteurs sont généralement utilisés dans la robotique industrielle comme substitut haute performance aux moteurs pas à pas.
S. Naresh Reddy
M.tech dans le système embarqué
Guide de projet
La structure du robot mécanique doit être contrôlée pour perfo  tâche rm. Il existe trois phases différentes pour contrôler le robot, telles que la perception, le traitement et l'action. Les capteurs donnent les informations sur la position de ses articulations et de son effecteur d'extrémité au robot, puis ces informations sont traitées vers l'unité de commande et calculent le signal approprié au moteur qui se déplace mécaniquement. La grande majorité des robots utilise des moteurs électriques. Les moteurs à courant continu sans balais et à balais sont utilisés à plusieurs reprises dans les robots portables et les moteurs à courant alternatif dans les robots industriels. Ces moteurs sont préférés dans les systèmes avec des charges plus légères et où la forme prédominante de mouvement est la rotation.
tâche rm. Il existe trois phases différentes pour contrôler le robot, telles que la perception, le traitement et l'action. Les capteurs donnent les informations sur la position de ses articulations et de son effecteur d'extrémité au robot, puis ces informations sont traitées vers l'unité de commande et calculent le signal approprié au moteur qui se déplace mécaniquement. La grande majorité des robots utilise des moteurs électriques. Les moteurs à courant continu sans balais et à balais sont utilisés à plusieurs reprises dans les robots portables et les moteurs à courant alternatif dans les robots industriels. Ces moteurs sont préférés dans les systèmes avec des charges plus légères et où la forme prédominante de mouvement est la rotation.
Suresh Megaji
M. Tech dans les systèmes de communication sans fil
Rédacteur de contenu technique

Si vous souhaitez vous impliquer dans la «robotique» et son application à «l’industrie», il faut connaître les «moteurs» utilisés en robotique car la robotique dépend principalement des moteurs. Différents «moteurs» tels que les moteurs à courant continu, pulsés, pas à pas, à entraînement optique, à tour partiel et à effet hall, etc. sont utilisés avec certaines techniques pour les appliquer dans l'industrie et les rendre conviviaux, comme
- Les moteurs à courant continu sont utilisés pour les applications orientées batterie, les applications à vitesse plus lente et de mobilité.
- Partout où nous avons besoin d'une application orientée rotation, nous pouvons utiliser des moteurs pas à pas comme des moteurs unipolaires et bipolaires.
- Pour les mouvements de la tête et des bras, nous pouvons utiliser des moteurs à rotation partielle.
- Si nous voulons utiliser des champs magnétiques, nous pouvons utiliser des moteurs à effet Hall et à lecteur optique, etc.
En utilisant la robotique qui utilise des moteurs intelligents, nous pouvons économiser de l'argent, du temps, de l'espace, des mouvements dangereux, etc.
Ajay Sahare
Responsable marketing

Les robots industriels sont utilisés dans un environnement de fabrication industrielle. Ce sont les bras spécialement développés pour des applications telles que le soudage, la manutention, la peinture et autres.
Tous les appareils mécatroniques utilisés dans un environnement industriel ne peuvent pas être considérés comme des robots. Tel que défini par l'ISO (Organisation internationale de normalisation), un manipulateur polyvalent, reprogrammable et contrôlé automatiquement, programmable sur trois axes ou plus, est considéré comme un robot industriel.
Les moteurs utilisés en robotique industrielle sont
- Moteurs à courant alternatif (AC)
- Moteurs à courant continu (CC)
- Moteurs servo
- Moteurs pas à pas.
1. Les moteurs à courant alternatif peuvent être subdivisés en types asynchrones et synchrones. Par exemple, un moteur à courant alternatif à induction est une unité de type asynchrone qui est essentiellement composée d'un stator bobiné et d'un rotor. L'alimentation est connectée au fil et le courant alternatif qui le traverse induit un champ électromagnétique (EM) dans le fil enroulé, avec un champ suffisamment fort fournissant la force pour le mouvement du rotor. Les moteurs synchrones sont des moteurs à vitesse constante qui fonctionnent en synchronisme avec la fréquence de ligne CA et sont couramment utilisés lorsqu'une vitesse constante précise est requise.
2. De nombreuses applications industrielles, y compris la robotique, utilisent souvent des moteurs à courant continu en raison de la facilité de contrôle de la vitesse et de la direction. Ils sont capables d'une plage de vitesse infinie, de la pleine vitesse à zéro, avec une large plage de charges.
Étant donné que les moteurs à courant continu présentent un rapport couple / inertie élevé, ils peuvent réagir rapidement aux changements des signaux de commande. Un moteur à courant continu peut être contrôlé en douceur jusqu'à zéro mouvement et instantanément accéléré dans la direction opposée sans avoir besoin de circuits de commutation de puissance complexes. Les moteurs CC sans balais à aimant permanent sont généralement plus chers que les types à balais, bien qu'ils puissent offrir des avantages en termes de consommation d'énergie et de fiabilité.
Sans collecteur, les moteurs sans balais peuvent fonctionner plus efficacement et à des vitesses plus élevées que les moteurs à courant continu conventionnels. La plupart des moteurs CC sans balais fonctionnent sur une forme d'onde CA trapézoïdale, mais certains des moteurs fonctionnent avec des ondes sinusoïdales. Les moteurs sans balais entraînés par onde sinusoïdale peuvent obtenir un fonctionnement en douceur à des vitesses inférieures avec une faible ondulation du couple, ce qui les rend idéaux pour le meulage, le revêtement et d'autres applications telles que la finition de surface.
Dans le cas de moteurs CC à balais, si vous souhaitez que votre moteur tourne plus lentement sans perdre de puissance, vous pouvez utiliser la modulation de largeur d'impulsion (PWM). Cela signifie essentiellement allumer et éteindre le moteur très rapidement. De cette façon, le moteur tourne à une vitesse inférieure comme si une tension plus basse était appliquée sans prendre en charge la puissance.
Fondamentalement, le couple généré par un moteur à courant continu à balais est trop petit et la vitesse est trop élevée pour être utile. Ainsi, les réductions de vitesse sont généralement utilisées pour réduire la vitesse et augmenter le couple.
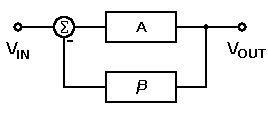
3. Les servomoteurs sont utilisés dans les systèmes en boucle fermée avec un contrôleur numérique. Le contrôleur envoie des commandes de vitesse à un amplificateur pilote, qui à son tour alimente le servomoteur. Une certaine forme de dispositif de rétroaction, comme un résolveur ou un codeur, fournit des informations sur la position et la vitesse du servomoteur. Le résolveur ou le codeur peut être intégré au moteur ou situé à distance. En raison du système en boucle fermée, un servomoteur peut fonctionner avec un profil de mouvement spécifique qui est programmé dans le contrôleur.
4. Les moteurs pas à pas peuvent fonctionner avec ou sans rétroaction, la rotation du moteur étant divisée en petits pas angulaires. Il est contrôlé par des signaux de commande pulsés et peut s'arrêter précisément à un point commandé sans avoir besoin de freins ou d'embrayages. Lorsque l'alimentation est coupée, un moteur pas à pas à aimant permanent reste généralement dans sa dernière position. Plusieurs moteurs pas à pas peuvent être maintenus en synchronisation en les pilotant à partir d'une source commune.
Dev desai
Responsable marketing 
Si vous envisagez de vous impliquer dans la robotique, vous devrez vous familiariser avec les nombreux types de moteurs disponibles.Tous les mouvements de la robotique sont motorisés d'une manière ou d'une autre, il est donc important de savoir quelle est votre option.
Moteurs à courant continu
En plus d'être alimenté par batterie, le sens de déplacement d'un moteur à courant continu est déterminé par la polarité de la puissance d'entrée. C'est une nécessité absolue pour les fonctions robotiques. Heureusement, ce type de moteur est disponible dans une grande variété de tailles, d'exigences de tension et est disponible partout.
Les différents types de moteurs sont comme ci-dessous
- Moteur de base de mobilité
- Moteur de loisir à grande vitesse
- Moteur d'entraînement par courroie
- Moteur de voiture à sous
- Fonctionnement par impulsion
- Moteur adapté au bras
- Pas à pas bipolaire avec pointeur
Moteur bio
Le bio-métal est une substance étonnante qui existe depuis quelques années et qui a un certain nombre d'applications dans le domaine de la robotique. Nous pouvons voir sur l'illustration, qu'un morceau de fil bio-métallique rétrécit de cinq pour cent de sa longueur lorsque seulement quelques volts sont appliqués dessus. Après des années de tests, le bio-fil s'est avéré solide, fiable et devient de plus en plus utile à mesure que de nouveaux produits émergent. Son temps de réponse un peu plus lent le rend idéal pour les applications robotiques de bras et de main, où les secousses seraient problématiques. Un long morceau de fil peut produire un mouvement important lorsqu'il est étiré sur toute la longueur d'un bras robotique. Il existe actuellement sur le marché commercial des kits de bras robotiques qui utilisent le bio métal.
Relais
Le relais, en robotique, est presque toujours utilisé pour isoler la puissance destinée aux moteurs, de l'alimentation pour la fonction informatique. Les moteurs, en raison de leur faible impédance, exigent beaucoup de courant sur les alimentations électriques et créent de multiples problèmes que les ordinateurs ne peuvent tolérer. Il est donc judicieux d'utiliser une source de courant élevé distincte pour les moteurs uniquement.
Solénoïdes
Les solénoïdes sont mieux utilisés comme dispositifs de commande de manipulateurs ou opérateurs de commutation. Leur mouvement est rapide et fort, donc un ressort est presque toujours utilisé dans les pinces pour adoucir l'action. Comme vous pouvez le voir sur l'illustration, des fils de commande sont utilisés pour fermer la pince. Ces fils de commande peuvent également servir de ressorts de rappel. Les préhenseurs comme celui-ci se retrouvent davantage dans le travail à la chaîne où la tâche est très mesurée et couvre des paramètres étroits.
Fonctions secondaires
La plupart des fonctions motrices impliquent la mobilité, le bras, la tête ou tout autre mouvement externe visible, cependant, certains mouvements moteurs ne sont pas aussi visibles. Les grands robots industriels utilisent des systèmes hydrauliques qui utilisent des moteurs de pompe pour produire une pression de fonctionnement d'un fluide hydraulique. Une autre fonction secondaire importante des moteurs est le réglage contrôlé. Pour améliorer la précision, les potentiomètres qui sont interfacés avec les moteurs sont généralement des dispositifs multi-tours.
Conclusion
Les robots peuvent être des dispositifs très complexes nécessitant une grande variété de mouvements motorisés. Cet article est destiné à donner un aperçu de la gamme d'appareils que vous pouvez utiliser en tant que constructeur de robots. Ce serait une bonne idée de commencer par faire des recherches sur les fournisseurs d'équipements robotiques et les fournitures disponibles. De nombreux produits sont actuellement disponibles et Internet facilite leur recherche, leur connaissance et leur utilisation. Quels que soient vos besoins, un peu d'ingéniosité et la détermination que semblent avoir tous les constructeurs de robots devraient bien vous servir.
Samadan Wandre
Responsable marketing
'Moteurs utilisés en robotique'
- Moteur de base de mobilité

- Moteur de loisir à grande vitesse
- Moteur d'entraînement par courroie
- Moteur de voiture à sous
- Fonctionnement par impulsion
- Moteur adapté au bras
- Pas à pas bipolaire avec pointeur

Les moteurs plus gros sont les mieux adaptés aux bases de mobilité qui permettent aux robots de manœuvrer le terrain. Certains de ces moteurs sont livrés avec des boîtes de vitesses pour produire la vitesse et le couple plus lents nécessaires à la mobilité. Abaisser la tension d'un moteur peut également le ralentir à une vitesse plus souhaitable. Seule l'expérimentation peut déterminer si votre moteur fonctionnera avec une tension inférieure. Si tel est le cas, vous vous évitez beaucoup de problèmes, sinon, il existe d'autres moyens de ralentir les moteurs. Certains moteurs à grande vitesse peuvent être utilisés si des engrenages à vis sans fin ou à vis sont utilisés.
Un exemple de l'engrenage à vis peut être vu dans l'illustration du bras robotique. Lorsque le moteur tourne dans le sens des aiguilles d'une montre, le boulon est tiré vers le moteur et le bras se contracte et lorsqu'il tourne dans le sens inverse des aiguilles d'une montre, le bras s'étend. Bien que l'arbre du moteur tourne rapidement, l'action du bras est considérablement plus lente en raison de la réduction de la vis.Dans cette illustration de circuit moteur suivante, nous voyons un moteur à courant continu contrôlé par un transistor de puissance. Un interrupteur de relais (Double Pole Double Throw), détermine la direction. Le transistor Q1 doit être un transistor de puissance pour supporter la lourde charge d'un moteur.
Moteurs pulsés
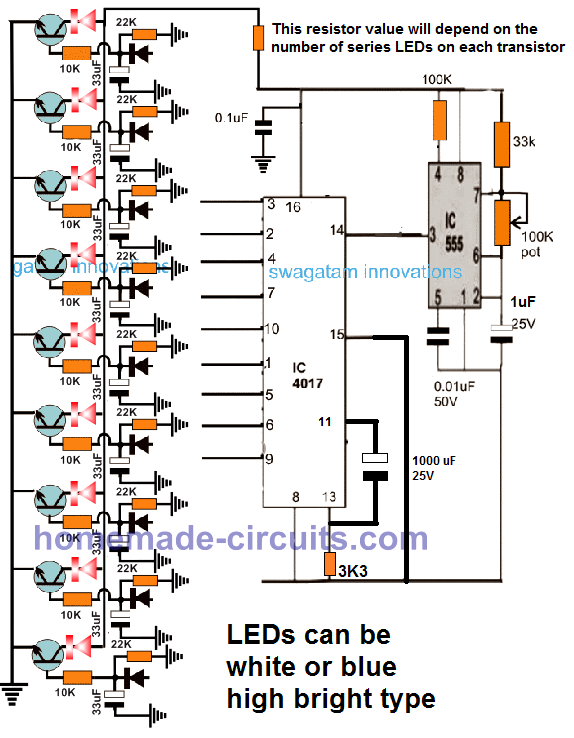
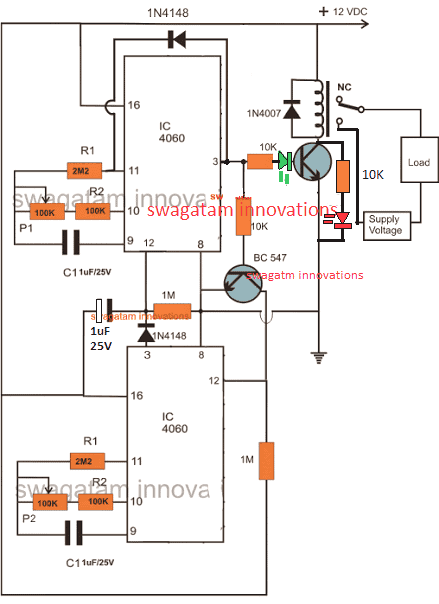
Certains moteurs dérivent une réduction de vitesse en fonctionnant à partir d'un signal CC pulsé. Ce signal est généralement d'environ cent Hz. La vitesse du moteur peut être modifiée en modifiant la largeur d'impulsion, et non en modifiant la fréquence de l'impulsion. Des moteurs comme ceux-ci peuvent être trouvés dans les magasins d'électronique excédentaires et peuvent être facilement identifiés par le générateur d'impulsions qui y est connecté. Tout moteur à courant continu peut cependant être entraîné par une source d'impulsions, et un schéma d'un tel circuit est inclus.
Comme vous pouvez le voir, une minuterie 555 a été choisie comme oscillateur d'entraînement, ce qui produit une fréquence d'environ 100 Hz. La résistance R1 et le condensateur C stabilisent et isolent le générateur d'impulsions des pointes produites par le moteur. Étant donné que cet appareil peut tirer d'une alimentation de 6 à 12 volts, vous voudrez peut-être changer la valeur des condensateurs C4 et C6 pour de meilleurs résultats, en fonction de la tension que vous utilisez. La sortie d'impulsion est prise de la broche trois de IC1 et envoyée à la broche deux de IC2, également une minuterie 555.
La seconde minuterie fait varier la largeur de l'impulsion en ajustant la tension qui est fournie au condensateur C6 via le potentiomètre R5 et la résistance R6. La durée de l'impulsion est ce qui détermine la vitesse du moteur et la largeur d'impulsion peut être ajustée de 10% à 100%.
Le transistor Q1 reçoit le signal modulé en largeur d'impulsion via la résistance R7. Étant donné que Q1 est un dispositif à faible courant, il transmet le signal à Q2, un transistor de puissance capable de gérer les demandes de courant du moteur. Ces transistors ne sont pas critiques et presque tous les types de transistors de puissance à faible courant fonctionnent. Le relais déterminera la direction que prendra le moteur.
Moteurs pas à pas
Le plus complexe de tous les moteurs est le moteur pas à pas. Comme son nom l'indique, le moteur tourne par incréments de degrés et fonctionne par impulsions. Le degré exact de virage par étape peut varier d'un fabricant ou d'un modèle à l'autre, mais 20 degrés est populaire et produit 18 étapes pour un tour complet. Il existe deux types de base de moteurs pas à pas, bipolaires et unipolaires. Comme vous pouvez le voir dans le schéma du moteur pas à pas, le bipolaire est simplement un moteur à deux bobines.
Le type unipolaire est constitué de deux bobines avec des prises centrales. Si les prises centrales sont ignorées, le moteur unipolaire peut fonctionner comme un type bipolaire. Les deux bobines d'un moteur pas à pas reçoivent des impulsions pas à pas alternativement en polarité d'une bobine à l'autre. Une carte de ce processus est fournie dans le diagramme de travail pour représenter graphiquement l'action du moteur. Contrairement aux moteurs CC conventionnels, le couple diminue avec la vitesse. Un type spécial d'unité d'entraînement est également nécessaire pour faire avancer le moteur pas à pas et doit être fourni avec le moteur. Il n'est pas recommandé de construire une unité de commande à moins que le moteur ne soit fourni avec une bonne fiche technique contenant des recommandations de composants et un schéma complet.
Le moteur peut nécessiter des tampons pour l'isoler du système d'entraînement, ou il peut nécessiter une alimentation électrique séparée. Quels que soient les besoins, ils peuvent varier considérablement d'un moteur à l'autre. Les magasins de bricolage sont les fournisseurs les plus fiables de moteurs pas à pas, et bien que les magasins électroniques excédentaires puissent parfois en avoir, ils peuvent ne pas inclure les informations de spécifications nécessaires.
Moteurs à tour partiel
Certaines fonctions robotiques ne nécessitent qu'un tour partiel, comme les mouvements de la tête ou des bras. Le moyen le plus simple d'y parvenir est d'utiliser des butées de position et des engrenages de glissement. Une illustration des détails mécaniques de ce type de moteur est fournie ci-dessus. Les micro-interrupteurs peuvent être utilisés comme capteurs d'arrêt pour couper l'alimentation et réinitialiser la direction de l'action suivante.
La roue inférieure est reliée au moteur tandis que la roue supérieure est séparée de la roue inférieure par un morceau de feutre circulaire. Lorsque la roue inférieure tourne, la roue supérieure tourne avec elle jusqu'à ce que la goupille d'arrêt entre en contact avec le micro-interrupteur. Certaines conceptions ne prévoient pas d'arrêter le moteur, donc de simples vis avec des entretoises fonctionneront comme des butées de moteur.
Bio-moteur
Le bio-métal est une substance étonnante qui existe depuis quelques années et qui a un certain nombre d'applications dans le domaine de la robotique. Nous pouvons voir sur l'illustration, qu'un morceau de fil bio-métallique rétrécit de cinq pour cent de sa longueur lorsque seulement quelques volts sont appliqués dessus. Après des années de tests, le bio-fil s'est avéré solide, fiable et devient de plus en plus utile à mesure que de nouveaux produits émergent. Son temps de réponse un peu plus lent le rend idéal pour les applications robotiques de bras et de main, où les secousses seraient problématiques. Un long morceau de fil peut produire un mouvement important lorsqu'il est étiré sur toute la longueur d'un bras robotique. Il existe actuellement sur le marché commercial des kits de bras robotiques qui utilisent le bio métal.
Bhaskar Singh
Responsable marketing
 Les robots industriels sont des dispositifs qui, dans une certaine mesure, reproduisent le mouvement humain tout en réduisant les dangers, offrant plus de force, de précision et de continuité. Ils ont besoin d'une large gamme de mouvements motorisés en fonction de leurs modes de fonctionnement, de leurs commandes, des outils utilisés et du travail à effectuer. Un moteur robotique industriel devrait avoir le potentiel de gérer un large éventail de tâches que les moteurs normaux afin de se spécialiser sur une tâche particulière.
Les robots industriels sont des dispositifs qui, dans une certaine mesure, reproduisent le mouvement humain tout en réduisant les dangers, offrant plus de force, de précision et de continuité. Ils ont besoin d'une large gamme de mouvements motorisés en fonction de leurs modes de fonctionnement, de leurs commandes, des outils utilisés et du travail à effectuer. Un moteur robotique industriel devrait avoir le potentiel de gérer un large éventail de tâches que les moteurs normaux afin de se spécialiser sur une tâche particulière.
Les moteurs électriques sont les plus couramment utilisés dans la robotique industrielle en raison de leur source d'énergie très efficace et de leur conception relativement simple, ce qui en fait une option plus populaire en termes de rapport coût-performance dans tous les aspects - installation, maintenance et entretien.
En fonction du travail nécessaire, différents moteurs sont utilisés à des fins différentes. Par exemple, les moteurs à courant continu sont utilisés pour les mouvements dans le sens horaire et anti-horaire, les exemples sont dans les grues et les palans, les moteurs pulsés sont utilisés pour fournir des mouvements pulsés en utilisant la largeur d'impulsion CC, les moteurs à rotation partielle sont utilisés pour fournir des mouvements de tête et de bras et le plus complexe - les moteurs pas à pas sont utilisés pour fournir des tours échelonnés par incréments de degrés.
De plus, en fonction du type de travail, des moteurs de différentes puissances et tailles sont utilisés à des fins différentes.Il existe plusieurs types de moteurs ayant chacun des applications différentes à différents endroits en fonction du travail et de la conception du robot.
Mohan Krishna. L
Directeur des ventes et du support
Les robots sont utilisés pour faire le travail qui pourrait être fait par les humains et il existe de nombreuses raisons pour lesquelles les robots sont meilleurs que les humains. 
Il existe deux principaux types de robots: -
Robot mobile: Cela bouge sur des jambes ou des pistes.
Robot stationnaire: Cela a une base fixe.
Les robots stationnaires peuvent généralement être utilisés pour ramasser des objets ou effectuer un autre travail qui consiste à atteindre un objet.
Un bras de robot comprend trois parties de base: -
- Articulation de l'épaule
- Articulation du poignet
- Base fixe
Besoin d'un robot pour
- Capacité à travailler rapidement et environnement dangereux.
- Capacité à répéter des tâches encore et encore.
- Capacité à travailler avec précision.
- Capacité à effectuer différentes tâches.
- Efficacité.
Le moteur est un dispositif qui convertit l'énergie électrique en énergie mécanique, c'est-à-dire un dispositif électromécanique.Il existe deux types de moteurs tels que le moteur à courant alternatif et le moteur à courant continu
Le moteur utilisé en robotique industrielle est un servomoteur. Le servomoteur est un moteur électrique simple contrôlé à l'aide d'un servomoteur.Si le moteur contrôlé est actionné par courant alternatif, il est appelé servomoteur AC, sinon servomoteur DC.La plupart des servomoteurs peuvent tourner d'environ 90 à 180 degrés. 360 degrés ou plus.Certaines des applications du servomoteur en robotique sont
- Application de servomoteur en robotique, c'est-à-dire, un simple robot de sélection et de placement, il est utilisé pour choisir un objet dans une position et placer l'objet à une position différente.
- Le servomoteur dans les convoyeurs est utilisé
- dans les unités industrielles de fabrication et d'assemblage pour faire passer un objet d'un poste d'assemblage à un autre. Par exemple: - Un processus de remplissage de bouteilles.
- Moteur servo dans véhicule robotique ici le servomoteur utilisé dans les roues. Depuis le servomoteur à rotation continue est utilisé.
Dinesh.P
Responsable marketing
 Des robots seront introduits pour réduire le travail acharné de l'homme et aider à créer de la chance pour les humains pour les développements futurs. Le terme robots désigne la machine qui imite les différentes caractéristiques humaines. La robotique comprend les connaissances en génie mécanique, électronique, électrique et informatique. Les moteurs utilisés dans les robots sont des moteurs à courant continu, des moteurs pas à pas et des servomoteurs
Des robots seront introduits pour réduire le travail acharné de l'homme et aider à créer de la chance pour les humains pour les développements futurs. Le terme robots désigne la machine qui imite les différentes caractéristiques humaines. La robotique comprend les connaissances en génie mécanique, électronique, électrique et informatique. Les moteurs utilisés dans les robots sont des moteurs à courant continu, des moteurs pas à pas et des servomoteurs
Où,
- Les moteurs à courant continu sont utilisés pour une rotation continue
- Les moteurs pas à pas sont utilisés pour une rotation à quelques degrés
- Les servomoteurs sont utilisés pour le positionnement, ils peuvent être utilisés dans les voitures et les avions
Ganesh .J
Responsable marketing 
Les robots sont utilisés pour faire le travail qui pourrait être fait par des humains et réduit également l'effort et le temps humains et améliore la qualité. Les moteurs utilisés en robotique industrielle sont
- Moteurs à courant alternatif (AC)
- Moteurs à courant continu (CC)
- Moteurs servo
- Moteurs pas à pas.