Dans le monde moderne, le robot jouera un rôle important . Le but principal du robot est de diminuer la puissance de l'homme. Les robots sont utilisés en électronique dans de nombreuses applications. Dans cet article, nous avons expliqué comment construire un robot avec le module Arduino et le microcontrôleur 8051. Pour construire un robot avec l'Arduino, nous expliquons le robot Arduino avec l'évitement d'obstacles. Les composants requis comprennent le corps du robot, le moteur à courant continu, le capteur à ultrasons, le module Arduino, le circuit intégré de pilote de moteur et le module Arduino
Comment construire un robot?
Le composants requis pour construire le robot comprend les éléments suivants
Corps du robot
Le corps du robot de base le robot d'évitement d'obstacles est montré dans l'image suivante. Le corps du robot est un corps en plastique et il contient des roues des deux côtés. Devant le corps du robot, le capteur à ultrasons est disposé. En utilisant le capteur à ultrasons, l'obstacle peut détecter. Lorsque le robot est en mouvement, si un obstacle est détecté par le capteur à ultrasons, le robot se déplacera sur le côté et continuera à se déplacer.

Corps du robot
Docteur moteur
Le Le moteur à courant continu est un moteur électrique et il fonctionne à l'électricité en courant continu. Le fonctionnement de tout moteur électrique est basé sur l'électromagnétisme. Le champ magnétique est produit par le conducteur porteur de courant lorsqu'il est placé dans un champ magnétique externe, il subira une force proportionnelle au courant dans le conducteur.Généralement, nous savons que les aimants sont d'attraction de polarité opposée du nord au sud et si les polarités sont les mêmes comme du nord au nord et du sud au sud, les aimants se repousseront.

Docteur moteur
La configuration interne du moteur à courant continu est conçue pour attacher l'interaction magnétique entre le conducteur de transport de courant et le champ magnétique externe pour produire le mouvement. En cela, nous utilisons deux moteurs à courant continu, chaque moteur contient 6v et le total des deux moteurs à courant continu contient 12v. Les deux moteurs à courant continu sont placés dans le corps du robot que nous pouvons observer dans l'image suivante. Le corps du robot est déplacé à l'aide des moteurs CC

Corps de robot avec moteur à courant continu
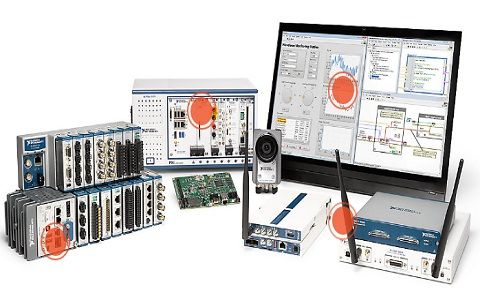
Module Arduino
L'image suivante montre l'image du module Arduino. Le module arduino joue un rôle important dans la conception du robot d'évitement d'obstacles utilisant le kit arduino. La broche du récepteur de l'arduino est connectée à la deuxième broche du capteur à ultrasons et les 1ère, 2ème et 3ème broches du module arduino sont connectées au pilote de moteur CC. Le condensateur et la diode des composants communs sont également connectés au module arduino à l'aide de l'alimentation de la batterie.

Module Arduino
CI pilote de moteur
Pour faire fonctionner le moteur à courant continu l'IC pilote de moteur utilisé. Les broches 3, 6 et 11, 14 du pilote de moteur sont connectées au moteur à courant continu. Les broches d'entrée 1 et 2 sont connectées au module arduino et la broche d'activation est connectée à la broche émetteur de l'arduino. Les broches 4, 5, 12, 13 du pilote du moteur sont reliées à la masse.

CI pilote de moteur
Capteur à ultrasons
Dans ce concept le capteur à ultrasons est utilisé pour détecter un obstacle devant et il enverra la commande à la carte arduino. En fonction du signal d'entrée, le microcontrôleur redirige le robot pour qu'il se déplace dans des directions alternatives.

Capteur à ultrasons
Les applications de l'évitement d'obstacles du robot Arduino
- Le robot Arduino peut se déplacer sur n'importe quelle surface
- Il peut se déplacer sur une surface métallique comme le corps du réfrigérateur.
L'image ci-dessous montre le robot arduino pour éviter les obstacles

Robot Arduino pour éviter les obstacles
Pour construire un robot avec le microcontrôleur 8051 nous expliquons sur le véhicule robot détecteur de métaux. Les composants nécessaires pour construire le robot avec le microcontrôleur 8051 sont
- Microcontrôleur 8051
- Moteurs à courant continu
- Pilotes de moteur
- Détecteur de métaux
- Décodeur
- Encodeur
- Boutons poussoir
- Cristal
- Émetteur et récepteur RF
Détecteur de métaux
Le Détecteur de métaux est une bobine, elle a une ou plusieurs bobines métalliques utilisées pour détecter les métaux sur le sol. Le détecteur de métaux fonctionne sur le principe de l'induction électromagnétique. Le détecteur de métaux est connecté au corps du robot via le PCB que nous pouvons observer dans la dernière image. L'image suivante montre le détecteur de métaux général utilisé dans les projets électroniques.

Détecteur de métaux
Boutons poussoir
Les boutons-poussoirs sont des boutons composés de métaux durs comme le plastique et le métal. Généralement, les boutons poussoirs sont utilisés pour réinitialiser le programme dans le microcontrôleur. L'image suivante montre l'image du bouton poussoir.

Bouton poussoir
Microcontrôleur 8051
Le Le microcontrôleur 8051 se compose de 40 broches . Les 4ème et 5ème broches du microcontrôleur sont connectées à l'oscillateur à cristal. La broche Vcc est donnée à l'alimentation de 5V et la broche de terre est connectée à la terre. Les broches 15, 16, 18, 19 du microcontrôleur sont connectées au codeur IC de HT12E. Les broches 2, 7, 8, 9 du microcontrôleur sont connectées aux boutons poussoirs.
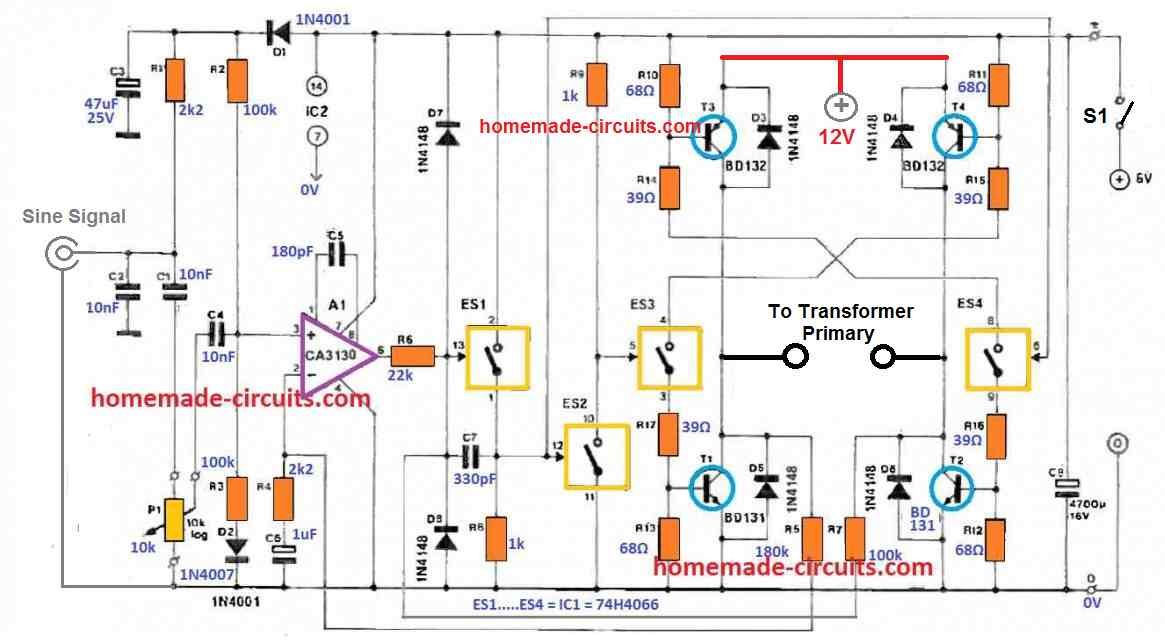
L'image suivante après avoir connecté tous les composants tels que la résistance, le condensateur, l'oscillateur à cristal, le microcontrôleur de la série 8051, les encodeurs, etc. sont allumés le circuit imprimé .

Connexions PCB
L'image ci-dessous montre le robot détecteur de métaux avec le microcontrôleur de la série 8051.

Robot détecteur de métaux avec microcontrôleur série 8051
Dans cet article, nous avons discuté de la Comment construire un robot avec l'arduino et le microcontrôleur 8051 . J'espère qu'en lisant cet article, vous avez acquis des connaissances de base pour construire un robot. Si vous avez des questions sur cet article ou sur l'électronique et projets de communication , n'hésitez pas à commenter dans la section ci-dessous. Voici la question pour vous, Qu'est-ce qu'un microcontrôleur de la série 8051?
.