
Le terme Robot a été introduit pour la première fois par un dramaturge tchèque Karel Capek en 1920. Le mot robot est également utilisé pour décrire un dispositif mécanique intelligent. La robotique est l'une des branches de la technologie et s'occupe de la conception, de la création, des opérations et applications des robots . Le mot robotique est dérivé du mot robot. Il y a principalement quatre types de robots disponibles sur le marché aujourd'hui: type série, type mobile, type parallèle et type marche. Les éléments des robots sont les manipulateurs, les effecteurs terminaux, les pinces, les blocs d'alimentation et les contrôleurs. Cet article répertorie les projets de robotique basés sur des microcontrôleurs pour les étudiants en génie.
Qu'est-ce qu'un robot?
Quand on pense à un robot, la première chose qui nous vient à l'esprit est que c'est une machine qui imite un humain. Mais en termes réels, il n'y a pas de définition standard pour un robot. Cependant, un robot doit posséder certaines caractéristiques fondamentales, par exemple: la détection, le mouvement, l'énergie et l'intelligence. Certains robots peuvent travailler seuls et effectuer certaines tâches, tandis que d'autres robots ont besoin d'une intervention et de l'aide d'êtres humains. Les robots sont utilisés dans de nombreuses applications telles que la communication médiale, spatiale et applications militaires.
Les dépenses en machines-outils ont augmenté à pas de géant dans les secteurs de l'électronique et de l'automobile. Selon les recherches de l'industrie, l'Inde a dépensé près de milliers de crores en machines-outils. Pour faire avancer la demande des systèmes robotiques rentables, les robots basés à Bangalore sont actifs et une entreprise a publié deux de ses robots rentables: Artrimus et G4. Artimus est un bras robotique rentable, et G4 est un robot portique à grande vitesse.

Projets robotiques utilisant un microcontrôleur
Qu'est-ce que les robots industriels?
Les robots industriels tels que définis par l'Organisation internationale (ISO) pour la normalisation sont des manipulateurs contrôlés à plusieurs reprises, reprogrammables et polyvalents, et programmables dans de nombreux axes. Ces robots sont conçus pour déplacer des pièces, des matériaux et des outils et pour effectuer diverses tâches de fabrication et de production.
Les robots industriels modernes sont de véritables sensations d'ingénierie. Ces robots peuvent transporter une charge d'une centaine de livres et la déplacer très rapidement avec une répétabilité. Ces robots sont programmables dans de nombreuses applications et sont utilisés dans les industries automobiles pour les applications d'assemblage, de soudage à l'arc et de manutention.

Robots industriels
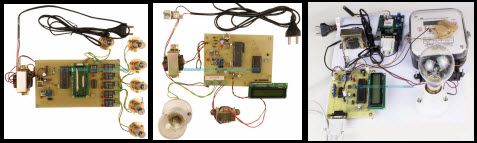
Projets de robotique basés sur des microcontrôleurs pour les étudiants en génie
La liste suivante fournit des projets de robotique rentables basés sur des microcontrôleurs, ce qui est utile pour les étudiants. Ainsi, les projets de robotique basés sur des microcontrôleurs pour les étudiants en génie comprennent ce qui suit.
Robot de téléprésence virtuel
Ce projet est utilisé pour concevoir un robot de téléprésence. Dans ce robot, une caméra est disposée dans une zone éloignée pour capturer l'environnement sous forme visuelle à l'aide de Raspberry Pi. Ces visuels sont affichés sur la réalité virtuelle du casque de l’utilisateur.
Une fonctionnalité supplémentaire permet à la caméra d'aller dans le sens des mouvements de la tête de l'utilisateur pour donner une expérience immédiate à l'utilisateur car s'il est là où le robot d'un robot de téléprésence virtuelle est placé. Ce type de robot utilise également de quelque manière que ce soit une application installée dans le Smartphone de l'utilisateur.
Robot de football
Ce projet est utilisé pour concevoir un robot de football. Ce robot peut se déplacer dans différentes directions telles que l'avant, la droite, l'arrière et la gauche à l'aide d'une application Android. Le mouvement de la vitesse du robot peut être contrôlé par l'angle de rotation du téléphone. Une fois que le smartphone est secoué, ce robot bottera une balle.
Robot pour la détection de métaux
Ce projet implémente un robot utilisant un microcontrôleur qui est utilisé pour détecter les métaux dans la voie devant lui. Ce type de robot est très utile pour détecter les mines terrestres ainsi que les métaux dans le sol. Ce projet utilise la technologie RF pour contrôler le robot.
Robot pour la détection humaine
Il existe différents robots de détection humaine disponibles en fonction de l'application. Mais lors des tremblements de terre, pour une équipe de secours, il est très difficile de détecter les humains sous les constructions car cela prend beaucoup de temps. Pour surmonter ce problème dans ces situations, le robot de détection humaine est mis en œuvre pour détecter l'heure inappropriée de l'homme à l'aide d'un capteur de détection humaine. Ce robot de détection humaine peut être utilisé manuellement grâce à la technologie RF à l'aide d'un PC
Index haptique contrôlé par des capteurs MEMS
Le toucher haptique est utilisé pour ressentir le monde en tenant des outils. Ce projet met en œuvre un robot détecté par l'index utilisé pour les personnes handicapées afin qu'elles puissent suivre la direction de l'index.
Le chemin du robot peut être continu sinon point à point. Le capteur utilisé dans ce robot détecte principalement la direction de l'index et génère la sortie. Cette sortie peut être transmise à l'aide de l'émetteur RF vers le récepteur RF.
Dans le récepteur RF, le récepteur reçoit le signal pour commander le microcontrôleur afin que le robot puisse se déplacer dans une direction spécifique. Ce système utilise la technologie RF, un capteur MEMS et un microcontrôleur. Le robot reçoit les commandes à l'aide du capteur MEMS. Dans la partie émetteur, ce capteur peut être disposé sur l'index.
Conception de véhicules sans pilote à l'aide d'un microcontrôleur
Ce projet implémente un véhicule sans pilote à l'aide d'un microcontrôleur et d'un réseau GSM. Ce projet remplace la télécommande RF à l'aide du réseau GSM car il présente différents inconvénients tels que la plage de fréquences est limitée et le contrôle limité.
Implémentation du robot Land Survey
Ce projet conçoit un robot utilisant un microcontrôleur à savoir un robot d'arpentage. Ce robot est spécialement conçu pour calculer la région du terrain et la diviser en différentes parcelles. Ce projet comprend deux parties comme le robot d'enquête et le module de mesure pour la zone. Le contrôle de ce robot peut se faire à l'aide du module ZigBee afin que le robot puisse se déplacer dans toute la parcelle.
Le calcul de la distance parcourue par le robot peut être fait en utilisant le concept de minuterie. Cette valeur de distance peut être envoyée au PC. Dans ce système, la deuxième partie implique le module de mesure de région. Ce module peut être conçu avec le langage C Embedded pour permettre à l'utilisateur de décider efficacement de la région du tracé.
Robot pour la peinture murale
Le concept principal de ce projet est de mettre en place un robot de peinture murale. Ce robot aide à réaliser des équipements de peinture à faible coût. La principale raison de concevoir ce robot est que les produits chimiques contenus dans la peinture murale peuvent causer des problèmes de santé aux peintres humains tels que des problèmes d'infection des yeux et de la gorge.
La peinture à la main prend beaucoup de temps en raison de travaux répétés. Une fois que les robots et les travailleurs de la construction sont correctement inclus dans les tâches de construction, toute la procédure de construction peut être mieux gérée en réduisant la main-d'œuvre.En outre, cela résoudrait la plupart des problèmes liés à la sécurité chaque fois que plusieurs activités se produisent en même temps.
Robot d'escalade mural
La fonction principale de ce robot est de concevoir et de développer un robot pour l'escalade de mur pour nettoyer une seule grande fenêtre. Ce robot se colle à la surface du verre à l'aide d'un aspirateur à ventouse. Ce robot nettoie la vitre à l'aide d'un essuie-glace qui est connecté au robot à l'avant. Une fois la vitre nettoyée, le robot arrêtera le nettoyage selon les instructions données par le microcontrôleur.
Pour l'adhésion du robot à l'extérieur, il existe différentes méthodes disponibles comme l'utilisation de la force magnétique, de la micro-colonne vertébrale, etc. Cependant, nous développons ici des Elecrochuks dans ce système pour atteindre l'adhésion du robot. Les dimensions de ce robot sont d'environ 690 mm fois alors que son poids est d'environ 3 kg en dessous.
Robot 4 en 1 utilisant un microcontrôleur
Ce projet met en œuvre un robot quatre en un basé sur un microcontrôleur qui fonctionne dans quatre modes tels que la détection de bord, le suivi de ligne, le pathfinder et la détection d'obstacles. Ce projet peut être construit avec le microcontrôleur ATMEGA168 pour atteindre l'objectif à l'aide des commutateurs, capteurs et LED.
Outil à énergie solaire utilisant un microcontrôleur et un bras robotisé
Les transactions de robots via des machines automatisées qui peuvent remplacer les humains impliquent simplement de ressembler à des humains. Le bras d'un robot est un type de dispositif mécanique généralement programmé en utilisant les mêmes fonctions qu'un bras humain. Nous savons que l'énergie solaire est une lumière vive ainsi que de la chaleur produite par le soleil. Le système proposé est utilisé pour concevoir un robot qui peut être alimenté par l'énergie solaire à travers les bras d'un robot pour choisir et placer un objet.
Dans le système proposé, le véhicule robotisé alimenté par l'énergie solaire a été principalement conçu. Ceci est principalement utilisé pour augmenter la puissance des véhicules utilisant l'énergie solaire. Dans ce projet, le bras robotique est conçu pour manipuler le véhicule pour ramasser et placer un objet. La charge des véhicules peut être effectuée en utilisant deux méthodes comme l'utilisation de l'alimentation directe et une autre est le suivi de l'énergie solaire. Par conséquent, toute l'énergie solaire peut être utilisée par le robot afin que l'opération requise puisse être effectuée.
Analyse et contrôle de robots mobiles pour l'inspection de canalisations
Ce projet conçoit un robot utilisé pour l'inspection du pipeline. Ce robot peut être conçu grâce aux capteurs. Dans ce projet, l'analyse de l'accélération et de la vitesse de la méthode à quatre barres est utilisée pour contrôler le robot. Ce robot utilise un micro-contrôle 8051 qui comprend deux sections comme l'émetteur et le récepteur.
L'émetteur comprend quatre commutateurs pour fournir quatre ordres tandis que le récepteur est connecté au GSM pour faire fonctionner le robot mobile une fois qu'il reçoit la commande, il envoie le message une fois que le robot détecte un obstacle. Dans le récepteur, il comprend un capteur infrarouge qui fonctionne via GSM pour détecter un obstacle. Le GSM aidera à concevoir des capacités interactives afin de réduire le temps nécessaire pour trouver le problème.
Système de contrôle pour fauteuil roulant électrique à l'aide des yeux
Ce projet est utilisé pour mettre en œuvre un système de contrôle pour un fauteuil roulant électrique utilisant les yeux. Le contrôle de ce système proposé ne peut se faire que par les yeux. Ainsi, les personnes physiquement handicapées peuvent contrôler elles-mêmes un fauteuil roulant électrique. En utilisant ce projet, le système proposé est résistant aux facteurs de puissance mentionnés ci-dessus. De plus, il est établi que ce projet peut être contrôlé par les yeux humains en toute sécurité et avec précision.
Servir le robot via RFID
Ce projet conçoit un robot de service à l'aide de la RFID. Ce type de robot est utilisé pour améliorer l'efficacité du service alimentaire aux clients au sein des restaurants, des hôtels en réduisant le temps d'attente. Dans ce projet, l'opération requise peut être effectuée à l'aide d'un microcontrôleur PIC ainsi que de la technologie RFID.
Land Rover exploité par téléphone portable
Ce projet implémente un robot land rover où le contrôle du robot peut être effectué en utilisant trois phases différentes telles que la perception, l'action et le traitement. En général, les précepteurs ne sont que des capteurs qui sont disposés sur le robot et le traitement peut être effectué via le microcontrôleur. La tâche peut être effectuée à l'aide de moteurs ou d'actionneurs.
Le robot de ce projet peut être contrôlé par téléphone en passant un appel au téléphone connecté au véhicule robotique. La tonalité mobile qui correspond à un bouton peut être entendue à la fin du traitement. Le robot land rover reconnaît cette tonalité DTMF à l'aide du téléphone empilé dans le robot
Robot contrôlé par Bluetooth
Ce projet met en œuvre un robot contrôlé via Bluetooth. Ces robots peuvent être utilisés grâce aux signaux transmis à partir d'un téléphone Android avec une communication Bluetooth. Les principaux composants utilisés dans ce projet sont le microcontrôleur, le moteur à courant continu et le module Bluetooth. La connexion entre le système et l'utilisateur peut être établie via le périphérique Bluetooth partout où un microcontrôleur est utilisé pour le traitement du signal. Les applications de ces robots incluent des véhicules à distance pour des missions sans pilote.
Robot contrôlé via Wi-Fi et microcontrôleur
De nos jours, le WiFi est devenu une partie essentielle de notre vie quotidienne et les différents appareils connectés à Internet augmenteront en raison du développement de la technologie. Dans ce projet, le processus d'intégration peut être effectué en utilisant un système embarqué ainsi qu'Internet.
Ce robot peut être utilisé via un site Web ou un ordinateur à l'aide du Wi-Fi comme le module de communication. Ce module doit être utilisé pour établir une connexion entre l'utilisateur et le robot. Les composants essentiels utilisés pour construire ce projet sont le microcontrôleur, les modules Wi-Fi tels que l'ESP8266 et les moteurs à courant continu.
Robot collecteur de déchets d'eau utilisant l'énergie solaire
Ce projet met en œuvre un robot innovant pour collecter les déchets d'eau à l'aide de l'énergie solaire. L’intention principale de ce projet est de nettoyer les déchets qui peuvent être collectés à la surface des plans d’eau. Ce projet aide à nettoyer l'eau afin de réduire la pollution.
Ce projet peut être contrôlé via une télécommande RC. Ce projet utilise des pompes à courant continu pour fournir le contrôle de la direction et de la disposition du servomoteur pour la navigation. Ici, deux panneaux solaires sont mis en œuvre pour rendre le robot autonome sur l'eau. Ces panneaux aident à charger la batterie et la collecte des ordures peut être effectuée à l'aide d'un calibre de fil.
Surveillance de la faune à l'aide d'un robot RF
Ce projet conçoit un robot pour la surveillance de la faune à l'aide de RF. En utilisant ce projet, l'opérateur n'a pas besoin de s'approcher des animaux sauvages pour prendre les images de très près. Ici, le robot est utilisé pour observer la faune des animaux à l'aide du système de vision nocturne à l'aide d'une caméra de vision nocturne sur le robot. Ce robot peut être contrôlé sans fil à l'aide d'une télécommande RF. La vidéo enregistrée peut être stockée sur le PC pour regarder les animaux.
Ce système utilise une unité de microcontrôleur 8051 pour recevoir des signaux de l'émetteur RF pour un processus ultérieur. Ces signaux peuvent être transmis au récepteur RF afin que le microcontrôleur traite ces données pour piloter les moteurs. Pour que les véhicules robots puissent être utilisés. Une fois que le microcontrôleur reçoit le signal pour changer la direction de la caméra, il se dirige vers le moteur pour atteindre l'angle préféré de la caméra. Par conséquent, l'observation de la faune peut être effectuée à l'aide d'un robot à travers une caméra de vision nocturne pour obtenir une vue plus proche des animaux à l'aide d'une télécommande RF.
Voici quelques idées de projets de robotique basés sur des microcontrôleurs.
- Bras robotique Pick-N- Place et le mouvement contrôlé par Android sans fil
- Véhicule robotique à commande vocale avec reconnaissance vocale longue distance
- Robot d'espionnage de champ de guerre avec caméra sans fil de vision nocturne par applications Android
- Le décodage de code Manchester contrôle la direction des robots par la télécommande TV
- Robotique de détection et de contrôle d'incendie
- Contrôle du bras robotisé via Internet LAN pour le fonctionnement du patient
- Robot de lutte contre les incendies commandé à distance par des applications Android
- Robot d'espionnage War Field avec caméra sans fil de vision nocturne
- Véhicule robotique de lutte contre l'incendie
- Pick-N-Place avec une pince à prise souple
- Véhicule robotique de détecteur de métaux
- Véhicule robotique contrôlé par téléphone portable
- Véhicule robotique suivant la ligne Utilisation du microcontrôleur
- Véhicule robotique contrôlé par IR
- Véhicule robotique télécommandé à écran tactile pour la gestion des magasins
- Train de métro automatique à la navette entre les stations
- Véhicule robotique d'évitement d'obstacles
- Véhicule robotique contrôlé par RF avec gestion du faisceau laser
Projets de robotique pour étudiants en génie
Ces dernières années, de nombreux étudiants en génie ont commencé à manifester un grand intérêt pour les projets robotiques par rapport à d'autres projets. Des robots tels que pick-n-place, suivi de ligne , les pistes murales et les projets de robotique utilisant des microcontrôleurs sont des projets populaires au niveau académique. La liste suivante de projets de robotique basés sur des microcontrôleurs et de projets robotiques pour les étudiants en génie est très utile pour les étudiants. En dehors de cela, il y a de l'électronique projets d'ingénierie sur des applications robotiques.

Projets de robotique pour étudiants en génie
- Robot d'alerte et de détection humaine en direct
- Robot contrôlé par PC sans fil
- Robot télécommandé basé sur RF avec caméra vidéo sans fil montée dessus
- Robot autonome avec vision artificielle pour la détection d'obstacles
- Robot de pulvérisation d'ambiance sans fil avec vision vidéo
- Robot de sélection et de placement simple
- Robot intelligent contrôlé par écran tactile
- Interface homme-robot utilisant une reconnaissance vocale robuste
- Robot de détection de gaz GPL et de fumée avec contrôle sans fil
- Robot multifonction sans fil contrôlé par PC
- Robot de reconnaissance vocale avec une indication de capteur d'incendie
- Robot télécommandé avec capteur d'incendie
- Bras robotique interfacé avec MCU / RF / IR / PC
- Robot pulvérisateur de vitesse
- Robot de suivi de panneau solaire
Projets de robotique simples pour les débutants
Pour les débutants, il vaut mieux y aller projets robotiques simples pour apprendre les concepts et techniques de base qui les mettront au défi de faire face à une robotique vaste et complexe au fur et à mesure qu'ils s'habitueront à les pratiquer.

Projets de robotique simples
- Robot contrôlé mobile utilisant GSM
- Robot évitant les bords
- Robot suivant léger
- Un robot de suivi de ligne simple
- Robot suiveur de mur
- Robot de détection de bombe
- Robot à énergie solaire de TRASH
- Robot ivre de poche
- Cafard solaire Virbobot
- Clignotant l'animal à LED
- Modèle robot-papier intraitable
Projets de robot Arduino
Arduino est un microcontrôleur à carte unique et son matériel consiste en une carte matérielle open-source. Cette carte matérielle est conçue à l'aide d'un Atmel 8 bits AVR microcontroller , ou un ARM Atmel 32 bits. Arduino est conçu pour donner un moyen facile de programmer des objets interactifs. Ici, nous avons mentionné une liste de projets de robotique basés sur des microcontrôleurs comme un Arduino.

Projets de robot Arduino
- Contrôlez un bras robotique OWI avec Arduino
- DFRobotshop Rover ou Arduino sur les pistes
- Robot Arduino à commande vocale
- Microbot basé sur Arduino Nano
- Voiture RC à conception inverse pour fabriquer un Rover Arduino
- 2WD étendent le châssis de la voiture intelligente du châssis du robot Arduino
- Kits de châssis de voiture intelligente Arduino Robot 4WD avec un encodeur de vitesse
- Le hack d'araignée Hexbug
- Stompy le robot qui marche
- Arduino Bot Proto
- Robot Arduino pour tester Whiley
- Robot auto-équilibré à 2 roues en utilisant Arduino et MPU6050
Projets d'ingénierie électronique
Dans notre vie quotidienne, l'électronique joue un rôle majeur. Donc, si nous apprenons quelques notions de base sur l'électronique, cela nous est favorable. Ces projets électroniques portent sur divers circuits qui peuvent inclure des concepts tels que des condensateurs, des diodes, des circuits intégrés, etc. De nombreuses personnes s'intéressent désormais à diverses branches de l'ingénierie électronique. Après avoir réalisé quelques projets dans la branche électronique de l'ingénierie, nous pouvons acquérir des connaissances pratiques en électronique. Pour ceux qui s'intéressent aux projets électroniques, la liste suivante projets et idées en génie électronique servirait à portée de main.
- Domotique basée sur Arduino
- Transfert de puissance sans fil dans l'espace 3D
- Contrôleur de pompe à liquide industriel avec intervalles de temps définis par l'utilisateur basés sur la minuterie
- Contrôle automatique de l'intensité des réverbères basé sur Arduino
- Principes du générateur haute tension CC par Marx
- Système de sécurité électronique à commande oculaire
- Longue portée Transmetteur FM avec modulation audio
- Charge commandée par relais basée sur la temporisation
- Passez de 6 V CC à 10 V CC à l'aide de la minuterie 555
- Vérificateur de séquence de phase pour alimentation triphasée
- Détecteur d'incendie ou de fumée avec système d'arrosage automatique
- Système de mise en marche et d'arrêt de la pompe basé sur GSM / GPRS
- Système IVRS contrôlé par téléphone portable
- Système de contrôle automatique de l'éclairage public utilisation de la LDR haute sensibilité
- Régulation automatique de la vitesse en fonction du véhicule entrant sur les voies rapides
- Applications des robots
- Les applications robotiques peuvent être classées en deux types: les applications actuelles et les applications futures.
- Les applications actuelles comprennent:
- Transfert de matériel, chargement et déchargement de la machine
- Opérations de traitement
- Assemblage et inspection
- Les futures applications incluent:
- Médical
- -Artillerie militaire, chargement, surveillance
- Applications domestiques
- Industrie électronique
- Atelier d'usinage entièrement automatisé
Il s'agit de la liste des projets sur la robotique comme les projets de robotique rentables basés sur des microcontrôleurs, les projets robotiques simples, les projets robotiques Arduino et les projets robotiques pour les étudiants en génie. Nous espérons que vous avez une meilleure compréhension et un meilleur concept des projets de robotique basés sur des microcontrôleurs. Veuillez partager votre point de vue sur cet article dans la section commentaires ci-dessous, et pour obtenir de l'aide supplémentaire pour mettre en œuvre ces projets, vous pouvez nous contacter.
Crédits photo:
- Projets de robotique utilisant un microcontrôleur par daihen-usa
- Robots industriels par linksic
- Projets de robotique pour les étudiants en génie par Electronicshub
- Projets de robotique simple par nootrix
- Projets de robots Arduino par rlocman









{kind=link}