L'article présente une conception de circuit de scooter électrique simple qui peut également être modifiée pour en faire un auto-pousse-pousse électrique. L'idée a été demandée par M. Steve.
La demande de circuit
J'ai eu la chance de trouver votre blog, des trucs vraiment incroyables que vous avez réussi à concevoir.
je recherche un DC à DC Step Up et contrôleur pour moteur de scooter électrique
Entrée: batterie SLA (plomb-acide scellée) 12 V, chargée à ~ 13,5 V
tension minimale - coupée à ~ 10,5 V
Sortie: moteur 60V DC 1000W.
Avez-vous rencontré un circuit comme celui-là?
Je peux imaginer que ce sera du type push-pull, mais je n'ai aucune idée des types de mosfets (donnez la puissance 80-100A), les pilotant, puis le transformateur, le type de noyau et ensuite les diodes.
Plus la tension minimale coupée pour plafonner le cycle de service du PWM.
J'ai trouvé plus d'informations. Le moteur est triphasé sans balais avec capteurs à effet Hall.
Il y a deux façons de l'aborder: a / laisser le contrôleur existant en place et ne faire monter que 12 V à 60 V ou b / remplacer également le contrôleur.
Il n'y aura aucune différence d'efficacité énergétique, le controlle commute simplement quelle phase reçoit le courant en fonction des capteurs à effet Hall. Par conséquent, respectez le plan a.
Merci beaucoup,
Steve

La conception
Aujourd'hui, fabriquer un véhicule électrique est beaucoup plus facile qu'auparavant, et cela est devenu possible grâce à deux éléments principaux de la conception, à savoir les moteurs BLDC et les batteries Li-ion ou Li-polymère.
Ces deux membres ultra performants ont fondamentalement permis au concept de véhicule électrique de devenir une réalité et pratiquement réalisable.
Pourquoi BLDC Motor
Le moteur BLDC ou le moteur sans balais est efficace car il est conçu pour fonctionner sans contacts physiques à l'exception des roulements à billes de l'arbre.
Dans les moteurs BLDC, le rotor tourne uniquement grâce à la force magnétique, ce qui rend le système extrêmement efficace, contrairement aux moteurs à balais antérieurs dont les rotors étaient attachés à la source d'alimentation par des brosses, provoquant beaucoup de frottements, d'étincelles et d'usure dans le système.
Pourquoi la batterie Li-Ion
Dans le même ordre d'idées, avec l'avènement des batteries Li-ion très améliorées et des batteries Lipo, la production d'électricité à partir de batteries n'est plus considérée comme un concept inefficace.
Auparavant, nous n'avions que des batteries au plomb-acide à notre disposition pour tous les systèmes de secours CC, ce qui posait deux inconvénients majeurs: ces homologues nécessitaient beaucoup de temps pour se charger, possédaient un taux de décharge limité, une durée de vie inférieure et étaient encombrants et lourds, tout cela ne faisant qu'ajouter à leur nature inefficace de travail.
Contrairement à cela, les batteries Li-ion ou Li-po sont plus légères, compactes, rapidement rechargeables à des taux de courant élevés et sont déchargeables à n'importe quel taux de courant élevé souhaité, elles ont une durée de vie plus élevée, sont des types SMF, toutes ces caractéristiques en font le bon candidat pour des applications telles que les scooters électriques, les rickshaws électriques, drones quadcopter etc.
Bien que les moteurs BLDC soient extrêmement efficaces, ceux-ci nécessitent des circuits intégrés spécialisés pour entraîner leurs bobines de stator, aujourd'hui, de nombreux fabricants produisent ces modules IC exclusifs de nouvelle génération qui non seulement remplissent la fonction de base de faire fonctionner ces moteurs, mais sont également spécifiés avec de nombreux autres caractéristiques, telles que: commande en boucle ouverte PWM, commande en boucle fermée assistée par capteur, multiples protections infaillibles, commande de marche arrière / avant du moteur, commande de freinage et une multitude d'autres fonctionnalités intégrées de pointe.
Utilisation d'un circuit pilote BLDC
J'ai déjà discuté d'une de ces excellentes puces dans mon article précédent, spécialement conçue pour gérer les moteurs BLDC à haute puissance, c'est le MC33035 IC de Motorola.
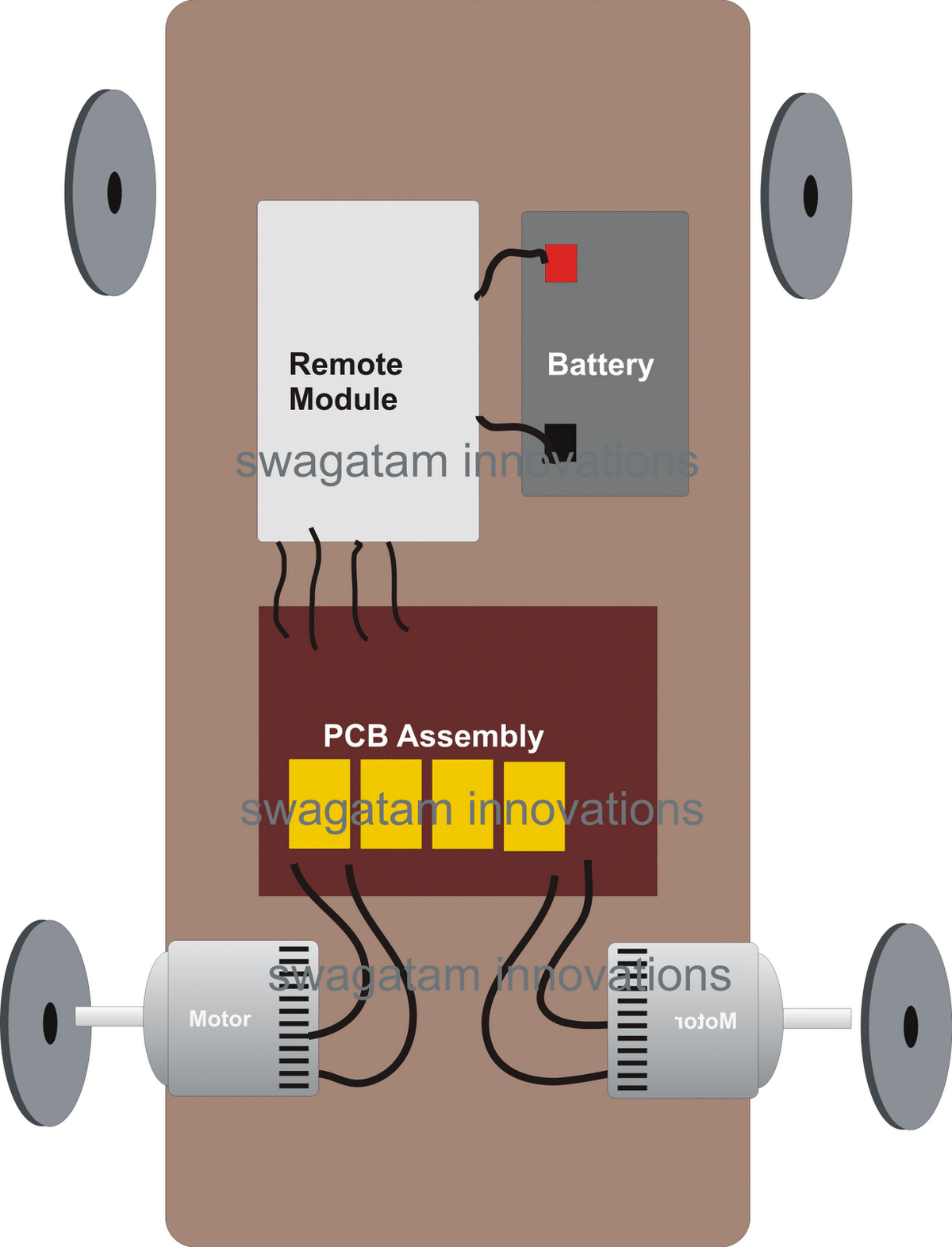
Apprenons comment ce module peut être efficacement mis en œuvre pour fabriquer un scooter électrique ou un pousse-pousse électrique, directement chez vous.
Je ne parlerai pas des détails mécaniques du véhicule, mais uniquement du circuit électrique et des détails de câblage du système.
Schéma

Liste des pièces
Toutes les résistances, y compris Rt mais à l'exclusion de Rs et R = 4k7, 1/4 watt
Ct = 10nF
Potentiomètre de vitesse = 10K linéaire
BJT de puissance supérieure = TIP147
Mosfets inférieurs = IRF540
Rs = 0,1 / capacité de courant max du stator
R = 1 K
C = 0.1uF
La figure ci-dessus montre un pilote de moteur à courant continu triphasé sans balais haute puissance IC MC33035 à part entière qui convient parfaitement à l'application proposée pour un scooter électrique ou un pousse-pousse électrique.
L'appareil possède toutes les fonctionnalités de base auxquelles on peut s'attendre dans ces véhicules et, si nécessaire, le circuit intégré peut être amélioré avec des fonctionnalités avancées supplémentaires grâce à de nombreuses configurations alternatives possibles.
Les fonctionnalités avancées deviennent spécifiquement possibles lorsque la puce est configurée en mode en boucle fermée, mais l'application discutée est une configuration en boucle ouverte qui est une configuration plus préférée car elle est très simple à configurer, tout en étant capable de remplir toutes les fonctionnalités requises ce à quoi on peut s'attendre dans un véhicule électrique.
Nous avons déjà discuté les fonctions de brochage de cette puce dans le chapitre précédent, résumons la même chose et comprenons également comment exactement le CI ci-dessus peut être nécessaire pour être mis en œuvre pour réaliser les différentes opérations impliquées dans un véhicule électrique.
Comment fonctionne l'IC
La section ombrée verte est le circuit intégré MC 33035 lui-même qui montre tous les circuits sophistiqués intégrés intégrés à la puce et ce qui la rend si avancée avec ses performances.
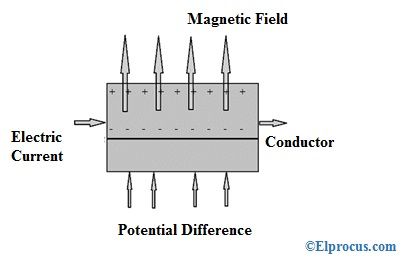
La partie ombrée en jaune est le moteur, qui comprend un stator triphasé indiqué par les trois bobines dans la configuration `` Delta '', le rotor circulaire indiqué par les aimants à pôles N / S et trois capteurs à effet Hall sur le dessus.
Les signaux des trois capteurs à effet Hall sont envoyés aux broches n ° 4, 5, 6 du circuit intégré pour un traitement interne et la génération de la séquence de commutation de sortie correspondante aux bornes des dispositifs d'alimentation de sortie connectés.
Fonctions de brochage et contrôles
Les broches 2, 1 et 24 contrôlent les dispositifs d'alimentation supérieurs configurés de manière externe tandis que les broches 19, 20, 21 sont affectées pour commander les dispositifs d'alimentation de la série inférieure complémentaires. qui contrôlent ensemble le moteur automobile BLDC connecté selon les diverses commandes alimentées.
Étant donné que le circuit intégré est configuré en mode boucle ouverte, il est censé être activé et contrôlé à l'aide de signaux PWM externes, dont le cycle de service est censé déterminer la vitesse du moteur.
Cependant, ce circuit intégré intelligent ne nécessite pas de circuit externe pour générer les PWM, il est plutôt géré par un oscillateur intégré et quelques circuits d'amplification d'erreur.
Les composantes Rt et Ct sont sélectionnées de manière appropriée pour générer la fréquence (20 à 30 kHz) pour les PWM, qui est envoyée à la broche n ° 10 du circuit intégré pour un traitement ultérieur.
Ce qui précède se fait grâce à une tension d'alimentation de 5V générée par le circuit intégré lui-même à la broche n ° 8, cette alimentation est utilisée simultanément pour alimenter les appareils à effet Hall, il semble que tout est précisément fait ici .... rien n'est gaspillé.
La partie ombrée en rouge forme la section de contrôle de vitesse de la configuration, comme on peut le voir, elle est simplement faite à l'aide d'un seul potentiomètre ordinaire .... le pousser vers le haut augmente la vitesse et vice versa. Ceci est à son tour rendu possible grâce aux cycles de service PWM variant en conséquence à travers le broches # 10, 11, 12, 13 .
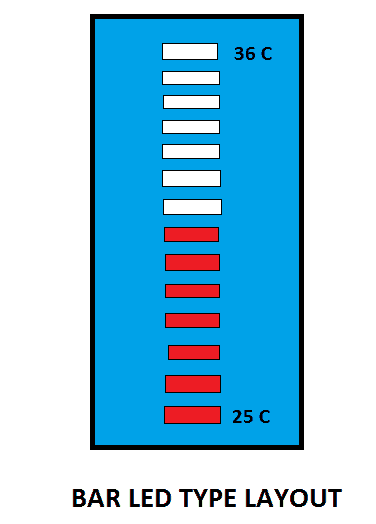
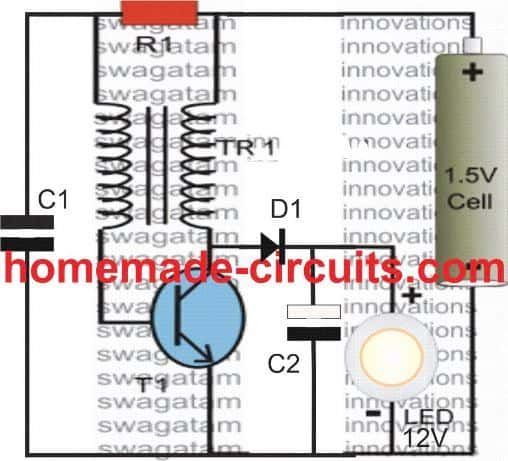
Le potentiomètre peut être converti en un circuit d'assemblage LDR / LED, pour obtenir un contrôle de la vitesse de la pédale sans friction dans le véhicule.
Broche n ° 3 sert à déterminer le sens avant, arrière de la rotation du moteur, ou plutôt le sens du scooter ou du pousse-pousse. Cela implique que maintenant votre scooter électrique ou votre pousse-pousse électrique aura la possibilité de faire marche arrière .... imaginez un deux-roues avec une fonction marche arrière, ..... intéressant?
Broche n ° 3 peut être vu avec un interrupteur, la fermeture de cet interrupteur rend la broche n ° 3 à la masse permettant un mouvement `` vers l'avant '' au moteur, tandis que son ouverture fait tourner le moteur dans le sens opposé (la broche 3 a une résistance de rappel interne, donc l'ouverture l'interrupteur ne cause rien de préjudiciable au CI).
De la même manière, le commutateur de la broche 22 sélectionne la réponse du signal de déphasage du moteur connecté, ce commutateur doit être activé ou désactivé de manière appropriée en référence aux spécifications du moteur, si un moteur en phase à 60 degrés est utilisé, le commutateur doit rester fermé , et ouvert pour un moteur phasé à 120 degrés.
Broche n ° 16 est la broche de masse du CI et doit être connectée à la ligne négative de la batterie et / ou à la ligne de masse commune associée au système.
Broche n ° 17 est le Vcc, ou la broche d'entrée positive, cette broche doit être connectée à une tension d'alimentation comprise entre 10 V et 30 V, 10 V étant la valeur minimale et 30 V la limite de claquage maximale pour l'IC.
Broche n ° 17 peut être intégré avec le 'Vm' ou la ligne d'alimentation du moteur si les spécifications d'alimentation du moteur correspondent aux spécifications IC Vcc, sinon la broche 17 pourrait être alimentée par un étage de régulateur abaisseur séparé.
Broche n ° 7 est le brochage 'enable' de l'IC, cette broche peut être vue terminée à la terre via un interrupteur, tant qu'elle est allumée et que la broche # 7 reste à la terre, le moteur est autorisé à rester activé, lorsqu'il est éteint, le moteur est désactivé, ce qui fait que le moteur est en roue libre jusqu'à ce qu'il s'arrête finalement. Le mode roue libre peut s'arrêter rapidement si le moteur ou le véhicule est sous une certaine charge.
Épingle n ° 23 se voit attribuer la capacité de «freinage» et provoque l'arrêt et l'arrêt du moteur presque instantanément lorsque l'interrupteur associé est ouvert. Le moteur peut fonctionner normalement tant que cet interrupteur est maintenu fermé et que la broche n ° 7 est maintenue à la terre.
Je recommanderais de regrouper l'interrupteur à la broche n ° 7 (activer) et à la broche n ° 23 (frein) afin qu'ils soient commutés avec une double action et ensemble, cela aiderait probablement à `` tuer '' la rotation du moteur efficacement et collectivement et permettent également au moteur de fonctionner avec un signal combiné des deux sorties.
«Rs» forme la résistance de détection chargée de vérifier les conditions de surcharge ou de surintensité du moteur, dans de telles situations. la condition de «défaut» est instantanément déclenchée, coupant immédiatement le moteur et le CI passe en mode de verrouillage en interne. La condition reste dans ce mode jusqu'à ce que le défaut soit corrigé et que la normalité soit rétablie.
Ceci conclut l'explication détaillée concernant les différents brochages des brochages proposés du module de commande de scooter électrique / pousse-pousse. Il doit simplement être correctement implémenté selon les informations de connexion indiquées dans le schéma pour une mise en œuvre réussie et en toute sécurité des opérations du véhicule.
De plus, l'IC MC33035 comprend également quelques fonctions de protection intégrées telles que le verrouillage de sous-volatilité qui garantit que le véhicule est éteint si le circuit intégré est inhibé par rapport à la tension d'alimentation minimale requise, ainsi qu'une protection contre les surcharges thermiques assurant que l'IC ne fonctionne jamais avec des températures excessives.
Comment connecter la batterie (alimentation)
Selon la demande, le véhicule électrique est spécifié pour fonctionner avec une entrée de 60V et l'utilisateur demande un Convertisseur boost pour acquérir ce niveau de tension plus élevé à partir d'une batterie 12 V ou 24 V plus petite.
Cependant, l'ajout d'un convertisseur élévateur pourrait rendre inutilement le circuit plus complexe et pourrait ajouter à une éventuelle inefficacité. La meilleure idée est d'utiliser 5nos de batteries 12V en série. Pour une autonomie et un courant suffisants pour le moteur de 1000 watts, chaque batterie peut être évaluée à 25 Ah ou plus.
Le câblage des batteries peut être mis en œuvre en se référant aux détails de connexion suivants:

Une paire de: Circuit de contrôleur de moteur sans balais haute puissance Suivant: Comment fonctionnent les convertisseurs Boost