Dans cette partie de l'article, nous découvrons une méthode innovante de conversion du mécanisme de presse à pédale dans les véhicules électriques en un signal électrique variant en conséquence, qui peut être en outre utilisé pour traiter la commande de vitesse du véhicule.
Le concept expliqué fonctionnera comme un accélérateur électronique, qui augmentera la vitesse du véhicule de manière linéaire lorsque la pédale est progressivement enfoncée, et vice versa, en utilisant la technologie PWM
L'idée a été demandée par Monsieur Lokesh Maini
Spécifications techniques
Je suis mécanicien, je travaille actuellement sur un véhicule électrique et je souhaite contrôler la vitesse de mon moteur à l'aide de la pédale. Je ne reçois pas de contrôleur pour mon moteur, aidez-moi à construire le mien, je serai hautement
reconnaissant
Les spécifications du moteur sont 36 volts, 43 ampères et un moteur à courant continu brossé de 1,5 ch.
La conception mécanique
Une version électronique d'un accélérateur de pédale nécessitera principalement un mécanisme pour d'abord convertir la pression mécanique de la pédale en un signal électrique variant en conséquence, de sorte que ce signal puisse être traité par un étage de processeur de signal pour la conversion souhaitée en une commande de vitesse pratique du véhicule.
De nombreux concepts peuvent être essayés tels que l'utilisation d'un capteur de charge piézo, d'un capteur de charge capacitif, d'un capteur de résonance, etc. Dans cet article, nous allons apprendre une méthode beaucoup plus simple conçue par moi qui incorpore un assemblage LED / LDR pour obtenir la même chose .

Dans la disposition électromécanique représentée sur la figure ci-dessus, nous pouvons voir les composants intégrés suivants:
Un petit engrenage attaché avec un mécanisme à vis.
La tête de la vis a une surface réfléchissante blanche mate
Un ensemble LED / LDR positionné devant la tête de vis.
Comment fonctionne le mécanisme proposé.
L'engrenage représenté sur la figure ci-dessus doit être verrouillé avec un autre engrenage dont le rapport peut être 10 fois supérieur à celui de cet engrenage.
L'engrenage le plus grand doit être configuré avec le mécanisme de pédale de sorte qu'il initie un mouvement de rotation en réponse à la pression de la pédale.
La réponse en rotation des engrenages produira à son tour un mouvement vers l'avant de la tête de vis à travers la chambre où se trouve l'ensemble LED / LDR.
Le processus fera en sorte qu'une quantité proportionnellement variable de lumière réfléchie par la LED sera reçue par le LDR.
Ces données variables (sous la forme d'une résistance variable) correspondant à l'enfoncement de la pédale peuvent ensuite être envoyées à un circuit de processeur de signal pour appliquer la commande de vitesse prévue du véhicule particulier.
Dans le prochain article nous allons apprendre l'étape du processeur de signal en utilisant la technique PWM.
Dans le section ci-dessus nous avons découvert un simple assemblage de convertisseur électromécanique pour transformer l'action de la pédale en un signal électrique variant proportionnellement.
Conversion de l'action de la pédale en PWM
Étudions maintenant une implémentation de circuit qui nous permettra de convertir le signal électrique de la pédale en un signal PWM variant en conséquence pour la commande de vitesse du moteur prévue du véhicule.

En se référant au schéma ci-dessus, nous pouvons évaluer le fonctionnement du circuit à l'aide des points suivants:
IC1 est configuré comme un générateur d'impulsions de 80 Hz ayant un temps de marche maximum et un temps d'arrêt minimum comme cycle de service
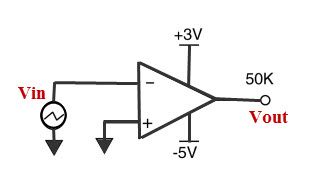
IC2 est truqué en tant que comparateur qui convertit d'abord l'impulsion de 80 Hz ci-dessus appliquée à sa broche2 avec des ondes triangulaires générées à sa broche6 et compare les ondes triangulaires avec la tension de modulation disponible à sa broche5.
La tension de modulation pin5 est dérivée d'un émetteur BJT BC547 qui est configuré comme un collecteur commun avec sa base connectée aux entrées LDR obtenues à partir des actions de la pédale.
Les résistances variables en réponse à la pression de la pédale sont comparées au réglage préréglé de 100K et une amplitude proportionnelle de tension est développée à la base du transistor qui convertit l'entrée de courant faible en un signal de courant élevé équivalent sur la broche5 de IC2.
Ce niveau de potentiel instantané est accepté et traité par IC2 générant une amplitude proportionnelle des signaux PWM pour le mosfet et le moteur connecté.
La vitesse du moteur est ainsi contrôlée et variée selon les PWM fluctuantes en réponse aux pressions sur les pédales du véhicule.
Les procédures ci-dessus convertissent efficacement les actions de la pédale en opérations contrôlées du moteur du véhicule et de sa vitesse.
Comment configurer le circuit.
C'est très facile.
- Appuyez sur la pédale à son point maximum de sorte que la tête de vis atteigne la position la plus proche possible devant l'ensemble LED / LDR.
- Ensuite, ajustez le préréglage 100k jusqu'à ce que la broche3 de l'IC2 commence à générer des PWM avec une largeur maximale, cela peut être confirmé en mesurant la tension à la broche3 pour qu'elle soit aussi proche que possible de la tension d'alimentation du circuit, soit 5V.
- Une fois que cela est fait, la procédure de configuration peut être considérée comme terminée.
- Les résultats peuvent maintenant être vérifiés en appuyant sur la pédale à différents niveaux et en vérifiant que la vitesse du moteur varie de manière identique.
Une paire de: Circuit de compteur ESR simple Suivant: Comment construire un circuit de lumière de croissance