Bien que les circuits de commande à distance d'un quadricoptère puissent être très facilement achetés sur le marché ou dans n'importe quelle boutique en ligne, un amateur électronique passionné n'est jamais autorisé à apprendre comment ces circuits fonctionnent réellement et s'ils peuvent ou non être construits à la maison?
Dans cet article, nous allons essayer de créer un circuit de commande à distance quadcopter simple en utilisant des composants discrets et en utilisant des modules de télécommande RF, et sans impliquer les circuits complexes basés sur MCU.
Le guide étape par étape permettra aux amateurs intéressés de comprendre comment un quadricoptère peut être contrôlé simplement à l'aide d'un concept PWM.
Nous avons déjà appris les bases du quadricoptère , examinons maintenant une section de contrôle à distance qui aidera finalement à piloter l'unité à distance.
Modules de base requis
Les principaux ingrédients pouvant être requis pour le projet sont indiqués ci-dessous:
Nous aurons fondamentalement besoin des 3 étapes de circuit suivantes:
1) Télécommande RF 4 voies Tx, modules Rx - 1 jeu
2) Circuits générateurs PWM basés sur IC 555 - 4nos
3) Circuits de contrôleur de moteur BLDC - 4nos
Comme il s'agit d'une version maison, on peut s'attendre à des inefficacités avec la conception proposée, comme l'absence de joysticks pour les commandes, qui sont remplacés par des potentiomètres ou des potentiomètres, néanmoins la capacité de fonctionnement du système peut être à égalité avec le unités professionnelles.
L'unité d'émetteur PWM portable se composera essentiellement du module distant Tx intégré avec 4 circuits de commande PWM discrets, tandis que le quadricoptère devra être entouré d'un circuit Rx intégré avec 4 circuits de pilotage BLDC discrets.
Commençons par les circuits du moteur du quadricoptère et voyons comment le contrôleur de moteur BLDC doit être configuré et connecté au circuit Rx.
Circuit récepteur PWM quadricoptère
Dans l'un des articles précédents, nous avons appris comment un contrôleur de moteur BLDC polyvalent pouvait être construit à l'aide d'une seule puce, mais cette conception n'est pas conçue pour faire fonctionner des moteurs relativement plus lourds d'un quadricoptère, elle peut donc ne pas convenir à la présente application.
Une option `` grand frère '' pour le circuit ci-dessus est heureusement disponible et devient parfaitement adaptée à la conduite de moteurs quadricoptères. Merci à TEXAS INSTRUMENTS, pour nous avoir fourni ces merveilleux modules de circuits spécifiés pour une application monopuce.
Pour en savoir plus sur ce circuit intégré de pilote BLDC à courant élevé, vous pouvez vous référer à la fiche technique pdf suivante du même
https://homemade-circuits.com/wp-content/uploads/2015/10/slwu083a.pdf
La configuration ci-dessous montre le schéma complet du circuit du contrôleur de pilote de moteur quadricoptère utilisant le DRV11873 IC qui est un circuit de moteur BLDC à faible courant autonome comprenant toutes les fonctions de protection requises telles que la protection contre les surcharges, la protection thermique, etc. Ce module forme essentiellement l'ESC pour notre unité quadricoptère actuelle.
Pour plus d'informations sur cette conception et les détails du PCB, vous pouvez vous référer au document original ci-dessous:
http://www.ti.com/lit/ds/symlink/drv11873.pdf

Comment ça fonctionne
Les broches FS et FG du CI sont destinées à améliorer le CI avec des commandes supplémentaires via des circuits externes, puisque nous n'utilisons pas ces fonctionnalités dans notre conception, ces broches peuvent être conservées inutilisées et terminées en ligne positive via une résistance de 100K.
Le brochage RD du CI décide du sens de rotation du moteur. La connexion de cette broche à Vcc via une résistance de 100K permet une rotation anti-horaire sur le moteur tout en la laissant non connectée fait le contraire et permet au moteur de tourner dans le sens horaire.
La broche n ° 16 est l'entrée PWM est utilisée pour injecter une entrée PWM à partir d'une source externe, la variation du cycle de service du PWM modifie la vitesse du moteur en conséquence.
Les brochages FR, CS ne sont pas non plus pertinents pour les besoins et peuvent donc être laissés inutilisés comme indiqué sur le schéma, et terminés sur la ligne positive par une résistance de 100K.
Les broches U, V, W sont les sorties du moteur qui doivent être connectées au moteur triphasé BLDC quadricoptère respectif.
Le brochage COM sert à connecter le fil commun du moteur triphasé, si votre moteur n'a pas de fil commun, vous pouvez simplement le simuler en connectant 3 nos de résistances 2k2 aux broches U, W, W puis joindre leur commun se termine par la broche COM du CI.
Le schéma montre également un IC 555 configuré dans le mode de circuit astable PWM. Cela devient une partie du module de circuit et la sortie PWM de sa broche # 7 peut être vue connectée à l'entrée PWM du circuit IC DRV afin d'initier les 4 moteurs avec une vitesse de base constante et de permettre au moteur un vol stationnaire constant vitesse à un endroit donné.
Ceci conclut le circuit ELC principal ou le circuit pilote BLDC pour la conception de quadcopter.
Nous aurons besoin de quatre de ces modules pour les quatre moteurs de notre conception de quadricoptère.
Cela signifie que 4 de ces DRV IC ainsi que l'étage IC 555 PWM devront être associés à chacun des 4 moteurs du quadricoptère.
Ces modules garantiront que, normalement, tous les 4 moteurs sont réglés à une vitesse prédéterminée en appliquant un signal PWM fixe et identique à chacun des CI de contrôleur DRV pertinents.
Voyons maintenant comment le PWM peut être modifié via une télécommande afin de modifier les vitesses du moteur individuel à l’aide d’une télécommande à 4 canaux ordinaire.
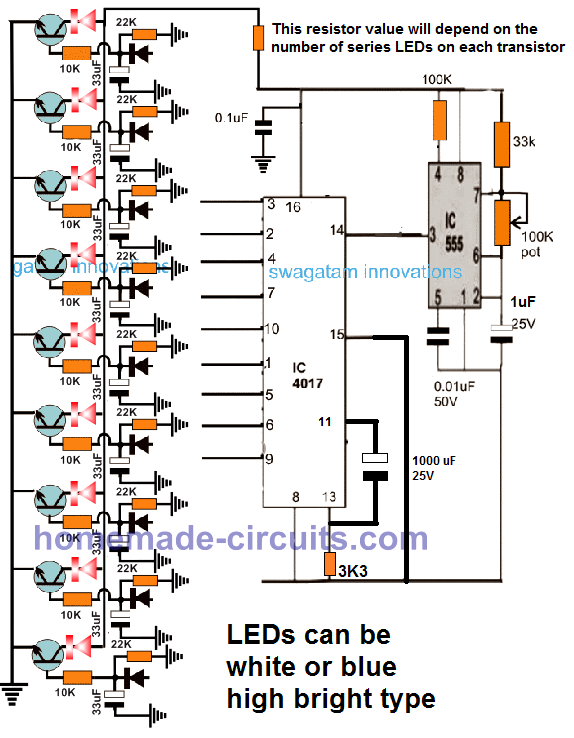
Le module récepteur RF (décodeur PWM)

Le circuit ci-dessus montre le circuit RF à distance du récepteur qui est censé être logé à l'intérieur du quadcoptère pour recevoir des données PWM sans fil externes du combiné émetteur à distance de l'utilisateur, puis traiter les signaux de manière appropriée afin d'alimenter les modules de contrôleur DRV accompagnant comme expliqué dans le section précédente.
Les 4 sorties nommées PWM # 1… .PWM # 4 doivent être connectées à la broche PWM # 15 du DRV IC comme indiqué dans le schéma précédent.
Ces broches PWM de l'unité de réception RF sont activées chaque fois que l'utilisateur appuie sur le bouton correspondant dans son combiné émetteur.
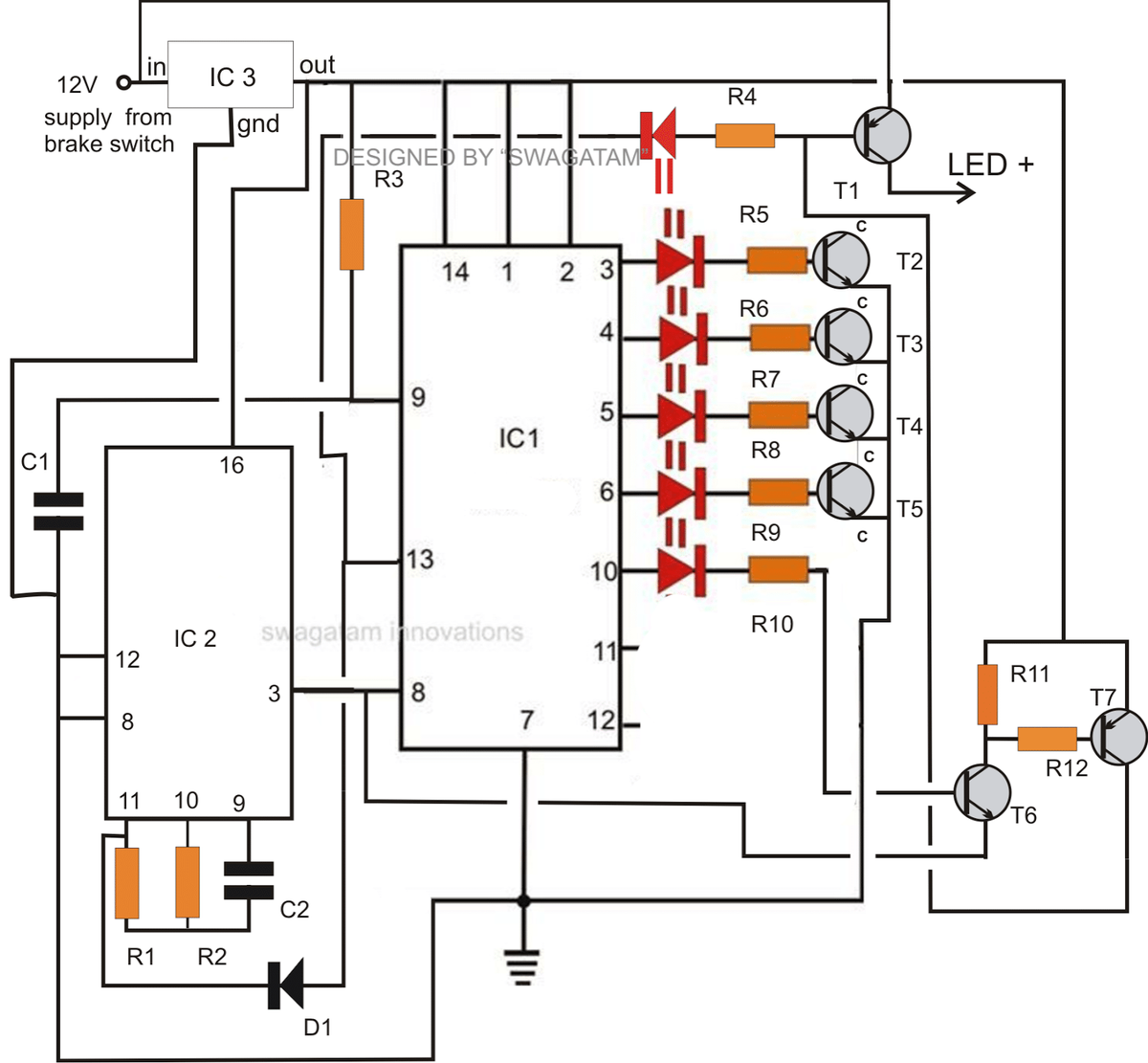
Comment l'émetteur RF doit être câblé (encodeur PWM)
Dans la section ci-dessus, nous avons discuté du Rx ou du circuit récepteur distant et de la manière dont ses 4 sorties doivent être connectées aux modules de pilotage ESC du moteur quadricoptère.
Nous voyons ici comment le simple émetteur RF doit être créé et câblé avec des circuits PWM pour transmettre les données PWM sans fil à l'unité de réception quadricoptère afin que les vitesses du moteur individuel soient contrôlées simplement en appuyant sur un bouton, ce qui provoque finalement le quadcopter pour changer de direction ou sa vitesse, selon les préférences des utilisateurs.

Le circuit illustré ci-dessus présente les détails de câblage du module émetteur. L'idée semble assez simple, le circuit émetteur principal est formé par la puce TSW434 qui transmet les signaux PWM codés dans l'atmosphère et le HT12E qui devient responsable de l'alimentation des signaux codés vers la puce TSW.
Les signaux PWM sont générés par 4 étages de circuit IC 555 séparés qui peuvent être identiques à celui qui a été décrit précédemment dans le module contrôleur DRV.
Le contenu PWM des 4 CI peut être vu terminé aux broches respectives de l'IC codeur HT12E par le biais de 4 boutons poussoirs discrets indiqués par SW1 ---- SW4.
Chacun de ces boutons correspond et fait basculer le brochage identique du module récepteur dont nous avons discuté précédemment et indiqué comme PWM # 1, PWM # 2… ..PWM # 4.
Cela signifie que le fait d'appuyer sur SW1 peut activer la sortie PWM # 1 de l'unité de réception et ce brochage commencera à fournir les signaux PWM décodés reçus de l'émetteur au module DRV associé et à son tour, le moteur concerné changera sa vitesse en conséquence.
De même, appuyer sur SW2,3,4 peut être utilisé pour influencer les vitesses des 3 autres moteurs quadricoptères selon le souhait des utilisateurs.
Circuit IC 555 PWM
Les 4 circuits PWM illustrés dans le combiné émetteur RF ci-dessus peuvent être construits en se référant au schéma suivant, qui est exactement similaire à celui qui a été vu dans notre circuit ESC de contrôleur DRV.

N'oubliez pas que le pot 5K peut être sous la forme d'un pot habituel et que ce pot peut être utilisé en plus avec les boutons pour sélectionner différentes vitesses sur les moteurs correspondants.
Cela signifie qu'en maintenant un bouton sélectionné enfoncé et en déplaçant simultanément le 5KPWMpot correspondant, le quadcopter peut augmenter ou diminuer sa vitesse dans la direction prévue.
En variante, le PWM pourrait être initialement réglé à un niveau supérieur ou inférieur, puis le bouton correspondant enfoncé pour permettre au moteur quadcoptère correspondant d'atteindre la vitesse préférée, selon le réglage PWM.
Spécifications du moteur quadricoptère
Le circuit de commande à distance Qiadcopter expliqué ci-dessus est destiné à être utilisé uniquement à des fins d'affichage et ne peut pas être utilisé pour soulever des charges ou une caméra. Cela implique que les moteurs utilisés dans la conception doivent être de préférence du type à faible courant.
Le circuit intégré DRV11873 est conçu pour opérer des moteurs de 15 V, 1,5 ampères ou environ 20 watts ... de sorte que tout moteur BLDC triphasé de 15 à 30 watts peut être utilisé à cette fin.
La batterie pour cette conception de quadricoptère peut être n'importe quelle batterie Li-ion Lipo pr 12v capable de fournir un pic de 15V à un courant continu de 1,5 ampères.
Détails des spécifications
Moteur CC Miniature Outrunner 1306N Brushless
Type: Micro moteur
Construction: aimant permanent
Commutation: sans balais
Vitesse (RPM): 2200rpm / v
Courant continu (A): 1,5 ~ 2,6A
Tension (V): 7,4 ~ 11,1 V
moteur à courant continu miniature: AX-1306N
poids: 8g
diamètre de l'arbre: 1,5 mm
Batterie LI-PO: 2-3s
courant de fonctionnement: 1,5 ~ 2,6A
efficacité maximale: 67%

Une paire de: Circuit de pilote de moteur BLDC sans capteur Un article: Circuit de contrôleur de chauffage à l'aide de boutons-poussoirs