Une introduction aux robots
Le robot est une machine qui ressemble à des êtres humains. Cela a été programmé pour faire quelque chose. Le mot Robot vient du mot slave robota (qui signifie travailleur forcé). Le robot a été développé en 1960. Les robots sont faits de métaux et mélangent d'autres éléments. Les robots ne font que commander et ce que les humains disent. Il y a trente ans, les robots faisaient partie d'un film de science-fiction. Mais aujourd'hui, la robotique est utilisée dans de nombreux domaines. Et c'est très important pour l'avenir de l'humanité. Le technologies robotiques sont améliorées pour aider la défense nationale, les soins de santé, la fabrication, la sécurité intérieure, l'éducation, les biens de consommation et de nombreux secteurs différents. Les médecins utilisent déjà la robotique dans des chirurgies spéciales. Les robots sont importants car ils effectuent des tâches dangereuses et impossibles à réaliser pour l'homme.
5 raisons pour lesquelles les robots sont populaires
- La vitesse
- Environnements dangereux
- Tâches répétitives
- Efficacité
- Précision
La vitesse:
Les robots peuvent être utilisés car ils sont plus rapides que les personnes à effectuer des tâches. Le robot est en fait un mécanisme contrôlé par un ordinateur. Nous savons que les ordinateurs peuvent effectuer des calculs et traiter des données très rapidement par rapport aux êtres humains. Certains robots se déplacent en fait plus rapidement pour effectuer une tâche, comme ramasser et insérer des objets, plus rapidement qu'un humain.
Environnements dangereux:
Les robots peuvent être utilisés dans un environnement dangereux car ils peuvent travailler là où un humain serait en danger. Par exemple, un robot peut être conçu pour supporter une plus grande quantité de chaleur, de rayonnement et de vapeurs chimiques que les humains.
Tâches répétitives:
Parfois, les robots ne sont pas vraiment beaucoup plus rapides que les humains, mais ils sont bons pour faire le même travail encore et encore. C'est facile pour le robot, car une fois que le robot a été programmé pour effectuer un travail une fois, le même programme peut s'exécuter plusieurs fois pour effectuer le travail plusieurs fois. Et le robot ne s'ennuiera pas comme le ferait un humain.
Efficacité:
L'efficacité consiste à effectuer des tâches sans gaspillage. Cette moyenne
- Ne pas perdre de temps
- Ne pas gaspiller de matériaux
- Ne pas gaspiller d'énergie
Précision:
La précision consiste à effectuer des tâches de manière très précise. Dans une usine de fabrication d'articles, chaque article doit être fabriqué de manière identique. Lors de l'assemblage des articles, un robot peut positionner les pièces à une fraction de millimètre.
Contrôler un robot
Un robot de base ou un système robotique se compose d'un corps rigide qui abrite l'ensemble des circuits du robot. Le circuit se compose de capteurs qui détectent tout changement dans l'environnement et transmettent ces informations à l'unité de contrôle.
Sur la base de l'entrée des capteurs, l'unité de commande commande en conséquence les actionneurs. Ainsi, le fonctionnement principal du robot réside dans l'unité de commande. Dans certaines applications, le robot est complètement automatique, c'est-à-dire que le contrôle se trouve dans l'appareil lui-même et sur la base d'une unité de capteur, les actionneurs sont automatiquement contrôlés par l'unité de commande. Dans certaines applications, le robot est contrôlé manuellement.
Voyons deux façons de contrôler un robot manuellement
- Utiliser un téléphone portable
- Utilisation d'une télécommande TV
Véhicule robotique contrôlé par téléphone portable:
Quand on parle de véhicules robots sans fil , nous pensons généralement aux circuits de technologie RF. Mais ce projet est très différent. Il utilise un téléphone portable pour contrôler le mouvement du véhicule robotique. Ici, nous avons utilisé la technologie DTMF pour contrôler le véhicule robotisé en utilisant le téléphone mobile. Nous avons utilisé deux téléphones portables, l'un est connecté au robot et l'autre est le téléphone de l'utilisateur. La communication est établie entre ces deux mobiles et si une touche est enfoncée, cette tonalité est entendue à une autre extrémité de la cellule. Cette tonalité est appelée tonalité «double tonalité multifréquence» (DTMF).

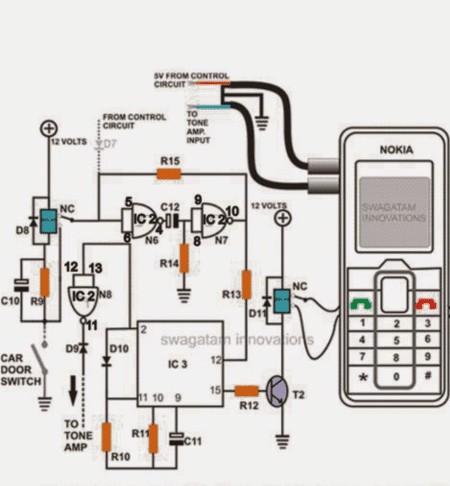
Véhicule robotique contrôlé par téléphone portable

Schéma du circuit du véhicule robotique contrôlé par téléphone portable
Ce projet vise à développer un véhicule robotique qui est contrôlé par le téléphone portable. Ceci est basé sur le microcontrôleur 8051. Les deux téléphones portables contrôlent le robot selon les besoins. Un téléphone portable est connecté au robot et un autre est la cellule utilisateur. Lorsqu'une touche enfoncée sur le téléphone portable de l'utilisateur, cette touche génère la tonalité correspondante, elle est reçue dans une autre cellule. La tonalité reçue est traitée par le microcontrôleur à l'aide du décodeur DTMF. Le décodeur décode la tonalité DTMF en chiffres binaires et ces données codées en binaire sont envoyées au microcontrôleur. Sur la base de l'entrée du téléphone portable, le microcontrôleur donne en conséquence des signaux appropriés au pilote de moteur pour faire tourner chacun des moteurs dans la direction souhaitée. Par exemple, en appuyant sur un numéro particulier sur le mobile de l'utilisateur, l'appel est automatiquement composé sur le téléphone mobile du système. Le système mobile est connecté au décodeur DTMF qui décode en conséquence la tonalité et le moteur tourne dans le sens correspondant au nombre pressé.
Véhicule robotique contrôlé par IR:
Dans ce système, un véhicule robotique est principalement contrôlé par la télécommande du téléviseur. Le capteur infrarouge (IR) est interfacé avec l'unité de commande du robot pour détecter le signal à distance. Cette information est transmise à l'unité de contrôle qui déplace le robot conformément aux exigences. Un microcontrôleur est utilisé comme système de contrôle.
Dans cette télécommande infrarouge fonctionne comme un émetteur. Au moment où le bouton est enfoncé dans la télécommande, le signal sera transmis et obtenu par le récepteur IR. Ce signe est envoyé au microcontrôleur qui décode le signal et effectue le mouvement correspondant selon le bouton enfoncé dans la télécommande. Par exemple, si le numéro 1 est enfoncé dans la télécommande, le robot sera tourné à gauche selon nos exigences. Le test des autres engagements (avant, arrière et droit) sera effectué de manière comparative en utilisant l'IR. A la réception, le développement est réalisé par deux moteurs qui sont interfacés avec le microcontrôleur.
Le programme est écrit, c'est-à-dire que pendant son exécution, il envoie des commandes au circuit intégré de commande de moteur selon ses exigences pour faire fonctionner le moteur pour le mouvement du robot comme expliqué ci-dessus.

Schéma de principe du véhicule robotique contrôlé par IR
En cas de doute concernant cet article, veuillez laisser un commentaire. Et laissez-moi savoir plus d'applications et de méthodes liées à cela?