L'interfaçage du moteur à courant continu avec le microcontrôleur est un concept très important dans de nombreuses applications industrielles et robotiques. En connectant le moteur à courant continu au microcontrôleur, nous pouvons contrôler la direction du moteur, contrôler la vitesse du moteur. Cet article vous décrit, Contrôle de la vitesse du moteur à courant continu à l'aide du microcontrôleur 8051 avec l'aide du contrôleur Bluetooth Android. Le schéma fonctionnel est illustré ci-dessous.

Schéma fonctionnel du contrôle de la vitesse du moteur à courant continu par application Android
Contrôle de la vitesse du moteur à courant continu par application Android
Contrôle de la vitesse du moteur à courant continu à l'aide d'un mobile Android a de nombreuses applications telles que les applications industrielles, les escaliers mécaniques, les ascenseurs, les applications robotiques et les applications de systèmes de sécurité. L'utilisateur doit installer une application Android sur son smartphone Android.
L'utilisateur peut envoyer des instructions pour contrôler la vitesse du moteur à courant continu. La communication sans fil Bluetooth est utilisée pour envoyer des commandes à l'utilisateur et au contrôleur. Les principaux composants matériels du circuit sont le microcontrôleur 8051, le pilote de moteur L293D IC, le moteur à courant continu, le module Bluetooth et le smartphone Android.
Veuillez consulter ce lien pour en savoir plus sur 8051 Histoire et bases du microcontrôleur
Le courant de sortie maximal de la broche du microcontrôleur est de 15 mA à 5 V, mais il ne fait pas fonctionner le moteur à courant continu et même la force électromotrice arrière produite par le moteur peut endommager le microcontrôleur.
Par conséquent, il n'est pas utile d'interfacer le moteur à courant continu directement avec le microcontrôleur. Ainsi, le circuit de commande de moteur (IC L293D) est utilisé pour Interface moteur à courant continu et microcontrôleur .
Pilote de moteur (L293D)
L293D est un circuit intégré (IC) de pilote de moteur à double pont en H. Les pilotes de moteur agissent comme des amplificateurs de courant car ils prennent un signal de commande à faible courant et fournissent un signal à courant plus élevé. Ce signal de courant plus élevé est utilisé pour entraîner les moteurs. L293D contient deux circuits de commande de pont en H intégrés . Dans son mode de fonctionnement commun, deux moteurs à courant continu peuvent être entraînés simultanément, à la fois dans le sens avant et arrière. Le fonctionnement du moteur de deux moteurs peut être contrôlé par une logique d'entrée aux broches 2 et 7 et 10 et 15.
La logique d'entrée 00 ou 11 arrêtera le moteur correspondant. Les Logic 01 et 10 le feront respectivement tourner dans le sens horaire et anti-horaire. Les broches d'activation 1 et 9 (correspondant aux deux moteurs) doivent être hautes pour que les moteurs commencent à fonctionner. Lorsqu'une entrée d'activation est élevée, le pilote associé est activé.
En conséquence, les sorties deviennent actives et fonctionnent en phase avec leurs entrées. De même, lorsque l'entrée d'activation est basse, ce pilote est désactivé et leurs sorties sont désactivées et à l'état haute impédance. Le schéma des broches et la structure interne du L293D IC sont illustrés ci-dessous.

Schéma des broches et structure interne du circuit intégré L293D
Qu'est-ce qu'Android?
Le Système d'exploitation Android fonctionne sur Linux, il est principalement conçu pour les appareils mobiles à écran tactile tels que les téléphones intelligents et les tablettes électroniques. L'un des systèmes d'exploitation mobiles les plus utilisés de nos jours est Android. L'androïde est un logiciel fondé à Palo Alto en Californie en 2003.

Mobile Android
L'Android est un système d'exploitation puissant et il prend en charge un grand nombre d'applications dans les Smartphones. Ces applications sont plus confortables et avancées pour les utilisateurs. Le matériel qui prend en charge le logiciel Android est basé sur Plateforme d'architecture ARM .
Android est un système d’exploitation open source, ce qui signifie qu’il est gratuit et que tout le monde peut l’utiliser. L'android a des millions d'applications disponibles qui peuvent vous aider à gérer votre vie d'une manière ou d'une autre et il est disponible à faible coût sur le marché pour cette raison qu'Android est très populaire.
Schéma de principe Explication de la commande de vitesse du moteur à courant continu
Le schéma de principe du circuit de commande de vitesse du moteur à courant continu et l'explication du fonctionnement sont donnés ci-dessous.

Diagramme schématique
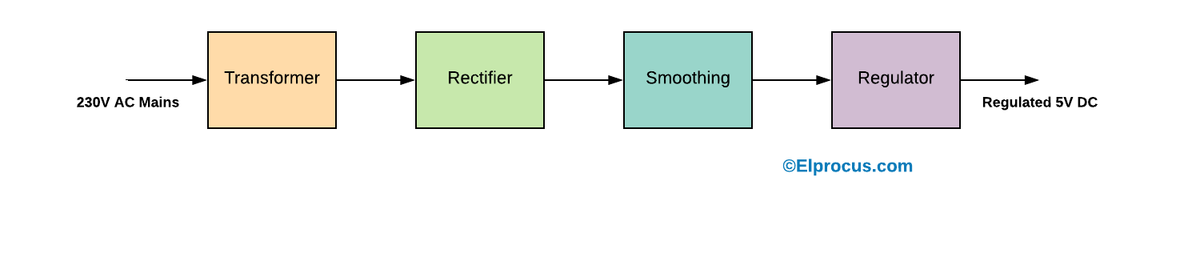
Le circuit utilise une alimentation standard comprenant un transformateur abaisseur de 230V à 12V et 4 diodes formant un pont redresseur qui délivre un courant continu pulsé qui est ensuite filtré par un Condensateur électrolytique d'environ 470 µF à 1000 µF.
Le courant continu filtré n'étant pas régulé, l'IC LM7805 est utilisé pour obtenir une constante 5V DC à sa broche n ° 3. Le 5V DC régulé est en outre filtré par un petit condensateur électrolytique de 10µF pour tout bruit ainsi généré par le circuit.
Le signal de contrôle de l'appareil Android sera envoyé via Bluetooth. Ce signal sera communiqué avec le microcontrôleur à l'aide de l'émetteur et du récepteur des deux appareils. Ce signal sera indiqué par une seule lettre qui contrôle la vitesse et la direction du moteur.
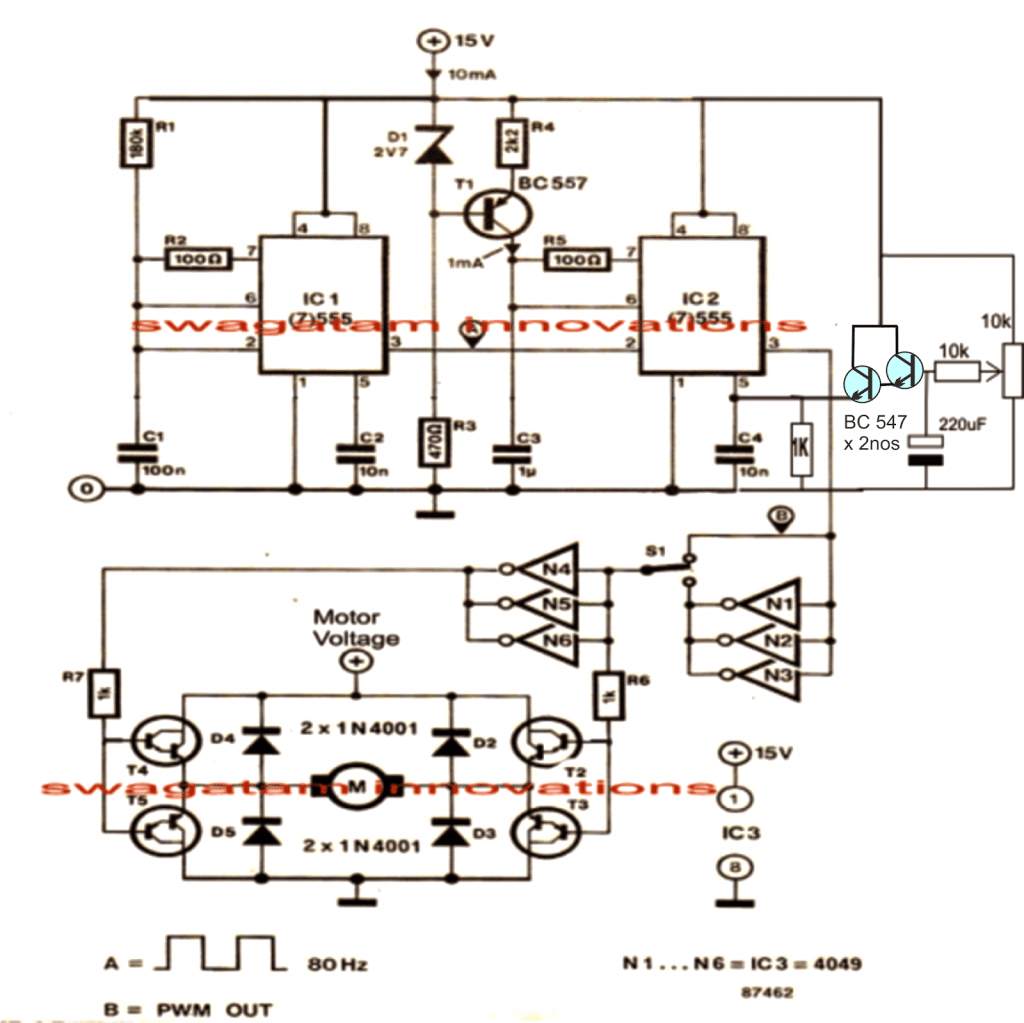
Comment contrôler la vitesse du moteur à courant continu? Dans ce projet, le principe de fonctionnement principal est que les impulsions PWM sont générées à partir du microcontrôleur programmé pour permettre à la broche 1 de L293D d'augmenter et de diminuer le cycle de service des impulsions. Ces impulsions de service peuvent conduire à entraîner le moteur à courant continu dans la bonne direction avec une vitesse spécifique.
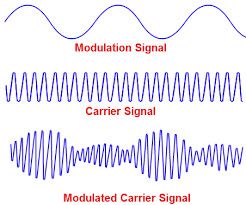
Modulation de largeur d'impulsion
Modulation de largeur d'impulsion est réalisé à partir de la sortie d'un microcontrôleur qui est dûment programmé pour prendre les données ainsi reçues par un appareil Bluetooth connecté à celui-ci. Un module Bluetooth est dûment interfacé avec le microcontrôleur pour un flux de données bidirectionnel tandis que le programme est exécuté pour développer les impulsions PWM.
L'application Android de n'importe quel téléphone intelligent communique via le Bluetooth intégré du téléphone au module Bluetooth qui est connecté au microcontrôleur pour les opérations nécessaires. Le rapport cyclique de modulation de largeur d'impulsion est indiqué ci-dessous.

Cycle de service PWM
Le bouton tactile haut du téléphone intelligent exécutant le programme Android est utilisé pour augmenter le cycle de service du PWM, tandis que le bouton tactile bas sert à réduire le cycle de service.

Application Android pour le contrôle de la vitesse du moteur à courant continu
Le docteur moteur traverse le circuit intégré de commande de moteur L293D avec un cycle de service variable appliqué pour permettre à la broche 1 de L293D d'être alimentée par le microcontrôleur pour le contrôle de la vitesse. Les broches de données LCD connectées au microcontrôleur pour afficher le pourcentage de vitesse à laquelle le moteur tourne.
Par conséquent, le contrôle de la vitesse du moteur à courant continu à l'aide de l'application Android est un moyen rentable, pratique et le plus sûr d'économiser de l'énergie. Une technique simple PWM (Pulse Width Modulation) peut être utilisée pour contrôler la vitesse du moteur. Le cycle de service de l'onde contrôle sa vitesse. En interchangeant les ports de sortie, cela changera efficacement la direction du moteur.
De plus, pour toute question concernant cet article, veuillez donner vos précieuses suggestions en commentant dans la section des commentaires ci-dessous. Voici une question pour vous, quelles sont les applications de l'interface de moteur à courant continu à un microcontrôleur?