
Comme son nom l'indique, cet article va donner une idée précise de la structure et du fonctionnement du régulateur PID. Cependant, en entrant dans les détails, laissez-nous vous présenter les contrôleurs PID. Les contrôleurs PID se trouvent dans une large gamme d'applications pour le contrôle de processus industriels. Environ 95% des opérations en boucle fermée du l'automatisation industrielle secteur utilisent des contrôleurs PID. PID signifie Proportional-Integral-Derivative. Ces trois contrôleurs sont combinés de manière à produire un signal de commande. En tant que contrôleur de rétroaction, il délivre la sortie de contrôle aux niveaux souhaités. Avant l'invention des microprocesseurs, le contrôle PID était mis en œuvre par les composants électroniques analogiques. Mais aujourd'hui, tous les contrôleurs PID sont traités par les microprocesseurs. Contrôleurs logiques programmables ont également les instructions du contrôleur PID intégré. En raison de la flexibilité et de la fiabilité des contrôleurs PID, ceux-ci sont traditionnellement utilisés dans les applications de contrôle de processus.
Qu'est-ce qu'un contrôleur PID?
Le terme PID signifie dérivée intégrale proportionnelle et il s'agit d'un type de dispositif utilisé pour contrôler différentes variables de processus telles que la pression, le débit, la température et la vitesse dans les applications industrielles. Dans ce contrôleur, un dispositif de retour de boucle de contrôle est utilisé pour réguler toutes les variables de processus.
Ce type de commande est utilisé pour conduire un système dans la direction d'un emplacement objectif sinon de niveau. Il est presque partout pour le contrôle de la température et utilisé dans les processus scientifiques, l'automatisation et une myriade de produits chimiques. Dans ce contrôleur, la rétroaction en boucle fermée est utilisée pour maintenir la sortie réelle d'une méthode comme près de l'objectif, sinon la sortie au point fixe si possible. Dans cet article, la conception du contrôleur PID avec des modes de contrôle utilisés comme P, I & D est discutée.
Histoire
L'histoire du contrôleur PID est: En 1911, le premier contrôleur PID a été développé par Elmer Sperry. Après cela, TIC (Taylor Instrumental Company) a mis en place un ancien contrôleur pneumatique entièrement réglable en 1933. Après quelques années, les ingénieurs de contrôle ont supprimé l'erreur de régime permanent qui se trouve dans les contrôleurs proportionnels en réaccordant la fin à une fausse valeur jusqu'à ce que l'erreur ne soit pas nulle.
Ce réaccord incluait l'erreur connue sous le nom de contrôleur proportionnel-intégral. Après cela, en 1940, le premier contrôleur PID pneumatique a été développé par une action dérivée pour réduire les problèmes de dépassement.
En 1942, Ziegler & Nichols ont introduit des règles de réglage pour découvrir et définir les paramètres appropriés des contrôleurs PID par les ingénieurs. Enfin, les contrôleurs automatiques PID ont été largement utilisés dans les industries au milieu de 1950.
Schéma fonctionnel du contrôleur PID
Un système en boucle fermée comme un contrôleur PID comprend un système de contrôle de rétroaction. Ce système évalue la variable de retour en utilisant un point fixe pour générer un signal d'erreur. Sur cette base, il modifie la sortie du système. Cette procédure se poursuivra jusqu'à ce que l'erreur atteigne zéro, sinon la valeur de la variable de retour devient équivalente à un point fixe.
Ce contrôleur fournit de bons résultats par rapport au contrôleur de type ON / OFF. Dans le contrôleur de type ON / OFF, il suffit d'obtenir deux conditions pour gérer le système. Une fois que la valeur de processus est inférieure au point fixe, elle s'active. De même, il s'éteindra une fois que la valeur est supérieure à une valeur fixe. La sortie n'est pas stable dans ce type de contrôleur et elle oscillera fréquemment dans la région du point fixe. Cependant, ce contrôleur est plus stable et précis que le contrôleur de type ON / OFF.

Fonctionnement du contrôleur PID
Fonctionnement du contrôleur PID
Avec l'utilisation d'un contrôleur ON-OFF simple à faible coût, seuls deux états de contrôle sont possibles, comme complètement ON ou complètement OFF. Il est utilisé pour une application de contrôle limité où ces deux états de contrôle sont suffisants pour l'objectif de contrôle. Cependant, la nature oscillante de ce contrôle limite son utilisation et est donc remplacé par des contrôleurs PID.
Le contrôleur PID maintient la sortie de telle sorte qu'il n'y ait aucune erreur entre la variable de processus et le point de consigne / la sortie souhaitée par des opérations en boucle fermée. Le PID utilise trois comportements de contrôle de base qui sont expliqués ci-dessous.
Contrôleur P
Le régulateur proportionnel ou P donne une sortie proportionnelle à l'erreur de courant e (t). Il compare la valeur souhaitée ou le point de consigne avec la valeur réelle ou la valeur de processus de retour. L'erreur résultante est multipliée par une constante proportionnelle pour obtenir la sortie. Si la valeur d'erreur est zéro, alors cette sortie du contrôleur est zéro.

Contrôleur P
Ce contrôleur nécessite une polarisation ou une réinitialisation manuelle lorsqu'il est utilisé seul. C'est parce qu'il n'atteint jamais l'état d'équilibre. Il fournit un fonctionnement stable mais maintient toujours l'erreur en régime permanent. La vitesse de réponse est augmentée lorsque la constante proportionnelle Kc augmente.

Réponse du P-Controller
Contrôleur I
En raison de la limitation du régulateur p où il existe toujours un décalage entre la variable de processus et le point de consigne, un régulateur I est nécessaire, ce qui fournit l'action nécessaire pour éliminer l'erreur en régime permanent. Il intègre l'erreur sur une période de temps jusqu'à ce que la valeur d'erreur atteigne zéro. Il contient la valeur du dispositif de contrôle final à laquelle l'erreur devient zéro.

Contrôleur PI
Le contrôle intégral diminue sa sortie lorsqu'une erreur négative se produit. Cela limite la vitesse de réponse et affecte la stabilité du système. La vitesse de la réponse est augmentée en diminuant le gain intégral, Ki.

Réponse du contrôleur PI
Dans la figure ci-dessus, à mesure que le gain du contrôleur I diminue, l'erreur en régime permanent continue également de diminuer. Dans la plupart des cas, le contrôleur PI est utilisé en particulier lorsque la réponse à haute vitesse n'est pas requise.
Lors de l'utilisation du contrôleur PI, la sortie du contrôleur I est limitée à une certaine plage pour surmonter le enroulement intégral conditions dans lesquelles la sortie intégrale continue d'augmenter même à un état d'erreur nul, en raison de non-linéarités dans l'installation.
Contrôleur D
Le contrôleur I n’a pas la capacité de prédire le comportement futur de l’erreur. Il réagit donc normalement une fois la valeur de consigne modifiée. Le contrôleur D surmonte ce problème en anticipant le comportement futur de l'erreur. Sa sortie dépend du taux de variation de l'erreur par rapport au temps, multiplié par la constante dérivée. Il donne le coup d'envoi à la sortie, augmentant ainsi la réponse du système.

Contrôleur PID
Dans la figure ci-dessus, la réponse de D, le contrôleur est plus, par rapport au contrôleur PI, et le temps de stabilisation de la sortie est également diminué. Il améliore la stabilité du système en compensant le retard de phase causé par le contrôleur I. L'augmentation du gain dérivé augmente la vitesse de réponse.

Réponse du contrôleur PID
Nous avons donc finalement observé qu'en combinant ces trois contrôleurs, nous pouvons obtenir la réponse souhaitée pour le système. Différents fabricants conçoivent différents algorithmes PID.
Types de contrôleur PID
Les contrôleurs PID sont classés en trois types tels que les contrôleurs de type ON / OFF, proportionnels et standard. Ces contrôleurs sont utilisés en fonction du système de contrôle, l'utilisateur peut utiliser le contrôleur pour réguler la méthode.
Contrôle ON / OFF
Une méthode de contrôle marche-arrêt est le type d'appareil le plus simple utilisé pour le contrôle de la température. La sortie de l'appareil peut être activée / désactivée sans état central. Ce contrôleur activera la sortie simplement une fois que la température aura franchi le point fixe. Un contrôleur de limite est un type particulier de contrôleur ON / OFF qui utilise un relais de verrouillage. Ce relais est réinitialisé manuellement et utilisé pour désactiver une méthode une fois qu'une certaine température est atteinte.
Contrôle proportionnel
Ce type de contrôleur est conçu pour supprimer le cycle qui est connecté via le contrôle ON / OFF. Ce contrôleur PID réduira la puissance normale fournie vers le radiateur une fois que la température atteindra le point fixe.
Ce contrôleur a une fonction pour contrôler le réchauffeur afin qu'il ne dépasse pas le point fixe, mais il atteindra le point fixe pour maintenir une température constante.
Cet acte de dosage peut être réalisé en activant et désactivant la sortie pendant de courtes périodes. Ce dosage du temps changera le rapport du temps ON au temps OFF pour contrôler la température.
Contrôleur PID de type standard
Ce type de contrôleur PID fusionnera le contrôle proportionnel par le biais d'un contrôle intégral et dérivé pour aider automatiquement l'unité à compenser les modifications au sein du système. Ces modifications, intégrales et dérivées sont exprimées en unités temporelles.
Ces contrôleurs sont également référencés par leurs réciproques, RATE & RESET en conséquence. Les termes du PID doivent être ajustés séparément, sinon ajustés à un système spécifique avec l'essai ainsi que l'erreur. Ces contrôleurs offriront le contrôle le plus précis et le plus stable des 3 types de contrôleurs.
Contrôleurs PID en temps réel
À l'heure actuelle, il existe différents types de contrôleurs PID disponibles sur le marché. Ces contrôleurs sont utilisés pour les exigences de contrôle industriel telles que la pression, la température, le niveau et le débit. Une fois que ces paramètres sont contrôlés via PID, les choix comprennent l'utilisation d'un contrôleur PID séparé ou d'un API.
Ces contrôleurs séparés sont utilisés partout où un sinon deux boucles doivent être vérifiées ainsi que contrôlées autrement dans les conditions où il est complexe à droite d'entrée par des systèmes plus grands.
Ces dispositifs de contrôle offrent différents choix pour le contrôle solo et double boucle. Les contrôleurs PID de type autonome fournissent plusieurs configurations en virgule fixe pour produire plusieurs alarmes autonomes.
Ces contrôleurs autonomes comprennent principalement des contrôleurs PID de Honeywell, des contrôleurs de température de Yokogawa, des contrôleurs de réglage automatique des contrôleurs OMEGA, Siemens et ABB.
Les API sont utilisés comme les contrôleurs PID dans la plupart des applications de contrôle industriel. L'agencement des blocs PID peut être effectué dans des PAC ou des API pour offrir des choix supérieurs pour un contrôle API exact. Ces contrôleurs sont plus intelligents et puissants par rapport aux contrôleurs séparés. Chaque API inclut le bloc PID dans la programmation du logiciel.
Méthodes de réglage
Avant le fonctionnement du régulateur PID, il doit être réglé en fonction de la dynamique du processus à contrôler. Les concepteurs donnent les valeurs par défaut pour les termes P, I et D, et ces valeurs ne peuvent pas donner les performances souhaitées et entraînent parfois une instabilité et des performances de contrôle lentes. Différents types de méthodes de réglage sont développés pour régler les contrôleurs PID et nécessitent beaucoup d'attention de la part de l'opérateur pour sélectionner les meilleures valeurs de gains proportionnels, intégraux et dérivés. Certains d'entre eux sont indiqués ci-dessous.
Les contrôleurs PID sont utilisés dans la plupart des applications industrielles, mais il faut connaître les paramètres de ce contrôleur pour l'ajuster correctement afin de générer la sortie préférée. Ici, le réglage n'est rien d'autre que la procédure consistant à recevoir une réponse idéale du contrôleur en définissant les meilleurs gains proportionnels, les facteurs intégraux et dérivés.
La sortie souhaitée du contrôleur PID peut être obtenue en réglant le contrôleur. Il existe différentes techniques disponibles pour obtenir la sortie requise du contrôleur comme l'essai et l'erreur, Zeigler-Nichols et la courbe de réaction du processus. Les méthodes les plus fréquemment utilisées sont les essais et erreurs, Zeigler-Nichols, etc.
Méthode d'essai et d'erreur: C'est une méthode simple de réglage du contrôleur PID. Pendant que le système ou le contrôleur fonctionne, nous pouvons régler le contrôleur. Dans cette méthode, tout d'abord, nous devons fixer les valeurs de Ki et Kd à zéro et augmenter le terme proportionnel (Kp) jusqu'à ce que le système atteigne un comportement oscillant. Une fois qu'il oscille, ajustez Ki (terme intégral) pour que les oscillations s'arrêtent et ajustez enfin D pour obtenir une réponse rapide.
Technique de courbe de réaction de processus: C'est une technique de réglage en boucle ouverte. Il produit une réponse lorsqu'une entrée pas à pas est appliquée au système. Au départ, nous devons appliquer manuellement une sortie de contrôle au système et enregistrer la courbe de réponse.
Après cela, nous devons calculer la pente, le temps mort, le temps de montée de la courbe, et enfin substituer ces valeurs dans les équations P, I et D pour obtenir les valeurs de gain des termes PID.

Courbe de réaction du processus
Méthode Zeigler-Nichols: Zeigler-Nichols a proposé des méthodes en boucle fermée pour régler le contrôleur PID. Ce sont la méthode de cyclage continu et la méthode d'oscillation amortie. Les procédures pour les deux méthodes sont les mêmes mais le comportement d'oscillation est différent. Dans ce cas, nous devons d'abord définir la constante p-controller, Kp à une valeur particulière tandis que les valeurs Ki et Kd sont nulles. Le gain proportionnel est augmenté jusqu'à ce que le système oscille à une amplitude constante.
Le gain auquel le système produit des oscillations constantes est appelé gain ultime (Ku) et la période des oscillations est appelée période ultime (Pc). Une fois qu'il est atteint, nous pouvons entrer les valeurs de P, I et D dans le contrôleur PID par le tableau Zeigler-Nichols en fonction du contrôleur utilisé comme P, PI ou PID, comme indiqué ci-dessous.

Table de Zeigler-Nichols
Structure du contrôleur PID
Le contrôleur PID se compose de trois termes, à savoir le contrôle proportionnel, intégral et dérivé. Le fonctionnement combiné de ces trois contrôleurs donne une stratégie de contrôle pour le contrôle du processus. Le contrôleur PID manipule les variables de processus telles que la pression, la vitesse, la température, le débit, etc. Certaines applications utilisent des contrôleurs PID dans des réseaux en cascade où deux ou plusieurs PID sont utilisés pour réaliser le contrôle.

Structure du contrôleur PID
La figure ci-dessus montre la structure du régulateur PID. Il se compose d'un bloc PID qui donne sa sortie au bloc de processus. Le processus / l'usine se compose de dispositifs de contrôle final tels que des actionneurs, des vannes de contrôle et d'autres dispositifs de contrôle pour contrôler divers processus de l'industrie / de l'usine.
Un signal de retour de l'installation de traitement est comparé à un point de consigne ou un signal de référence u (t) et le signal d'erreur correspondant e (t) est appliqué à l'algorithme PID. Selon les calculs de contrôle proportionnel, intégral et dérivé de l'algorithme, le contrôleur produit une réponse combinée ou une sortie contrôlée qui est appliquée aux dispositifs de contrôle de l'usine.
Toutes les applications de contrôle n’ont pas besoin des trois éléments de contrôle. Les combinaisons telles que les commandes PI et PD sont très souvent utilisées dans les applications pratiques.
Applications
Les applications du contrôleur PID sont les suivantes.
La meilleure application de contrôleur PID est le contrôle de la température où le contrôleur utilise une entrée d'un capteur de température et sa sortie peut être associée à un élément de contrôle comme un ventilateur ou un radiateur. Généralement, ce contrôleur n'est qu'un élément d'un système de contrôle de température. L'ensemble du système doit être examiné et pris en compte lors du choix du bon contrôleur.
Contrôle de la température du four
Généralement, les fours sont utilisés pour inclure le chauffage et contiennent une énorme quantité de matière première à des températures énormes. Il est courant que le matériau occupé comprenne une masse énorme. Par conséquent, il faut une grande quantité d’inertie et la température du matériau ne se modifie pas rapidement, même en cas d’application de chaleur énorme. Cette caractéristique se traduit par un signal PV modérément stable et permet à la période de dérivée de corriger efficacement le défaut sans changements extrêmes du FCE ou du CO.
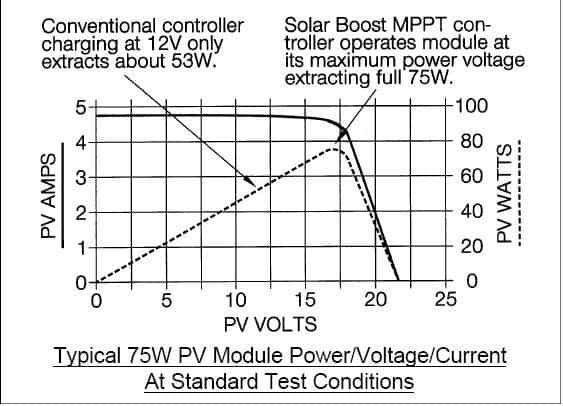
Contrôleur de charge MPPT
La caractéristique V-I d'une cellule photovoltaïque dépend principalement de la plage de température ainsi que de l'irradiance. En fonction des conditions météorologiques, le courant et la tension de fonctionnement changeront constamment. Ainsi, il est extrêmement important de suivre la plus haute PowerPoint d'un système photovoltaïque efficace. Le contrôleur PID est utilisé pour trouver le MPPT en donnant des points de tension et de courant fixes au contrôleur PID. Une fois les conditions météorologiques modifiées, le tracker maintient le courant et la tension stables.
Le convertisseur d'électronique de puissance
Nous savons que le convertisseur est une application de l'électronique de puissance, donc un contrôleur PID est principalement utilisé dans les convertisseurs. Chaque fois qu’un convertisseur est associé à un système basé sur le changement au sein de la charge, la sortie du convertisseur sera modifiée. Par exemple, un onduleur est associé à une charge, le courant énorme est fourni une fois que les charges sont augmentées. Ainsi, le paramètre de tension ainsi que le courant ne sont pas stables, mais ils changeront en fonction de l'exigence.
Dans cet état, ce contrôleur générera des signaux PWM pour activer les IGBT de l'onduleur. Sur la base du changement au sein de la charge, le signal de réponse est fourni au contrôleur PID de sorte qu'il produise n erreur. Ces signaux sont générés sur la base du signal de défaut. Dans cet état, nous pouvons obtenir une entrée et une sortie modifiables via un onduleur similaire.
Application du contrôleur PID: Contrôle en boucle fermée pour un moteur CC sans balais
Interfaçage du contrôleur PID
La conception et l'interfaçage du contrôleur PID peuvent être effectués à l'aide du microcontrôleur Arduino. En laboratoire, le contrôleur PID basé sur Arduino est conçu en utilisant la carte Arduino UNO, des composants électroniques, un refroidisseur thermoélectrique, alors que les langages de programmation logiciels utilisés dans ce système sont C ou C ++. Ce système est utilisé pour contrôler la température au sein du laboratoire.
Les paramètres du PID pour un contrôleur spécifique sont trouvés physiquement. La fonction de divers paramètres PID peut être mise en œuvre par le contraste ultérieur entre différentes formes de contrôleurs.
Ce système d'interfaçage peut calculer efficacement la température grâce à une erreur de ± 0,6 ℃ alors qu'une température constante régule par une simple petite différence par rapport à la valeur préférée. Les concepts utilisés dans ce système fourniront des techniques peu coûteuses et exactes pour gérer les paramètres physiques dans une plage préférée au sein du laboratoire.
Ainsi, cet article présente une vue d'ensemble du contrôleur PID qui comprend l'historique, le diagramme, la structure, les types, le fonctionnement, les méthodes de réglage, l'interfaçage, les avantages et les applications. Nous espérons avoir été en mesure de fournir des connaissances de base mais précises sur les contrôleurs PID. Voici une question simple pour vous tous. Parmi les différentes méthodes de réglage, quelle méthode est utilisée de préférence pour obtenir un fonctionnement optimal du régulateur PID et pourquoi?
Vous êtes prié de bien vouloir donner vos réponses dans la section commentaires ci-dessous.
Crédits photo
Schéma de principe du contrôleur PID par wikimedia
Structure du contrôleur PID, contrôleur P, P - réponse du contrôleur et contrôleur PID par blog.opticontrols
P - réponse du contrôleur par controls.engin.umich
Réponse du contrôleur PI par Viande
Réponse du contrôleur PID par wikimedia
Table Zeigler-Nichols par controls.engin





{kind=link}
{kind=link}
{kind=link}
{kind=link}