Nous savons que FF ou Flip-Flop peut être utilisé pour stocker les données sous la forme 1 ou 0. Cependant, si nous avons besoin de stocker plusieurs bits de données, nous avons besoin de nombreuses bascules. Un registre est un dispositif en électronique numérique qui est utilisé pour stocker les données. Les tongs jouent un rôle essentiel dans la conception du registres à décalage les plus populaires . L'ensemble des bascules n'est rien d'autre qu'un registre, utilisé pour stocker de nombreux bits de données. Par exemple, si un PC est utilisé pour stocker 16 bits de données, il nécessite par la suite un ensemble de 16 FF. Et, les entrées, ainsi que les sorties d'un registre, sont en série sinon parallèles en fonction des besoins. Cet article traite qu'est-ce qu'un registre à décalage , types et applications.
Qu'est-ce qu'un registre d'équipes?
Un registre peut être défini comme lorsqu'un ensemble de FF peut être connecté dans la série, le définition du registre à décalage est le moment où les données stockées peuvent être déplacées dans les registres. C'est un circuit séquentiel , principalement utilisé pour stocker les données, et les déplace vers la sortie à chaque cycle CLK (horloge).
Types de registres à décalage
Fondamentalement, ces registres sont classés en quatre types et fonctionnement des registres à décalage sont discutés ci-dessous.
- Registre à décalage série en sortie série (SISO)
- Registre à décalage série en parallèle (SIPO)
- Registre à décalage parallèle en sortie série (PISO)
- Registre à décalage parallèle en sortie parallèle (PIPO)
Serial in - Serial out Shift Register (SISO)
Ce registre à décalage permet une entrée série et génère une sortie série, il est donc nommé registre à décalage SISO (Serial in Serial out). Parce qu'il n'y a qu'une seule sortie, et à la fois les données quittent le registre un bit de manière série.

Serial in - Serial out Shift Register (SISO)
Le circuit logique Serial in Serial out (SISO) est illustré ci-dessus. Ce circuit peut être construit avec quatre D-Flip Flops en série. Une fois ces bascules connectées les unes aux autres, le signal CLK égal est donné à chaque bascule.
Dans ce circuit, l'entrée de données série peut être prise du côté gauche du FF (bascule). La principale application d'un SISO est de fonctionner comme un élément de retard.
Registre à décalage série en parallèle (SIPO)
Ce registre à décalage permet une entrée série et génère une sortie parallèle, c'est pourquoi on parle de registre à décalage série en sortie parallèle (SIPO).
Le circuit de registre à décalage série en parallèle (SIPO) est illustré ci-dessus. Le circuit peut être construit avec quatre Tongs en D , et en plus, un signal CLR est connecté au signal CLK ainsi que des bascules afin de les réorganiser. La première sortie FF est connectée à l'entrée FF suivante. Une fois que le même signal CLK est donné à chaque bascule, toutes les bascules seront synchronisées les unes avec les autres.

Registre à décalage série en parallèle (SIPO)
Dans ce type de registre, l'entrée de données série peut être prise depuis le côté gauche du FF et génère une sortie équivalente. Les applications de ces registres incluent des lignes de communication car la fonction principale du registre SIPO est de changer les informations série en informations parallèles.
Registre à décalage parallèle en série (PISO)
Ce registre à décalage permet une entrée parallèle et génère une sortie série, c'est pourquoi on parle de registre à décalage parallèle en sortie série (PISO).
Le circuit du registre de décalage parallèle en sortie série (PISO) est illustré ci-dessus. Ce circuit peut être construit avec quatre bascules D, où le signal CLK est connecté directement à tous les FF. Cependant, les données d'entrée sont connectées séparément à chaque FF à l'aide d'un multiplexeur à chaque entrée de FF.

Registre à décalage parallèle en série (PISO)
La sortie FF antérieure, ainsi que l’entrée de données parallèle, est connectée vers l’entrée du multiplexeur et la sortie du multiplexeur peut être connectée à la deuxième bascule. Une fois que le même signal CLK est donné à chaque bascule, toutes les bascules seront synchronisées les unes avec les autres. Les applications de ces registres incluent la conversion de données parallèles en données série.
Registre à décalage parallèle en parallèle (PIPO)
Le registre à décalage, qui permet une entrée parallèle (les données sont données séparément à chaque Tongues et de manière simultanée) et produit également une sortie parallèle est connue sous le nom de registre à décalage Parallel-In parallel-Out.
Le circuit logique donné ci-dessous montre un registre à décalage parallèle en parallèle. Le circuit se compose de quatre bascules D qui sont connectées. Le signal d'effacement (CLR) et les signaux d'horloge sont connectés aux 4 bascules. Dans ce type de registre, il n'y a pas d'interconnexion entre les bascules individuelles car aucun décalage série de données n'est nécessaire. Ici, les données sont données en entrée individuellement pour chaque bascule, et la sortie est également reçue séparément de chaque bascule.

Registre à décalage parallèle en parallèle (PIPO)
Un registre à décalage PIPO (Parallel in Parallel out) peut être utilisé comme un périphérique de stockage temporaire, similaire au registre à décalage SISO, et il fonctionne comme un élément de retard.
Registre à décalage bidirectionnel
Dans ce type de registre à décalage, si nous déplaçons un nombre binaire vers la gauche avec une place, cela équivaut à multiplier le chiffre par deux et si nous déplaçons un nombre binaire vers la droite d'une place, cela revient à séparer le chiffre par deux. Ces opérations peuvent être effectuées avec un registre pour déplacer les données dans n'importe quelle direction.
Ces registres sont capables de déplacer les données du côté droit sinon du côté gauche en fonction de la sélection du mode (haut ou bas). Si le mode haut est choisi, les données seront déplacées vers le côté droit, et si le mode bas est choisi, les données seront déplacées vers le côté gauche.
Le circuit logique de ce registre est montré ci-dessus, et le circuit peut être construit avec des bascules 4-D. La connexion des données d'entrée peut être effectuée dans les deux dernières parties du circuit et en fonction du mode sélectionné, seule la porte sera à l'état actif.
Compteurs dans les registres à décalage
Fondamentalement, compteurs dans les registres à décalage sont classés en deux types tels que le compteur d'anneau ainsi que le compteur Johnson.
Compteur de sonneries
Fondamentalement, il s'agit d'un compteur de registre à décalage dans lequel la première sortie FF peut être connectée au deuxième FF et ainsi de suite. La dernière sortie FF est à nouveau renvoyée à la première entrée de bascule, c'est-à-dire le compteur en anneau.

Compteur de sonneries
Le modèle de données dans le registre à décalage se déplacera jusqu'à ce que les impulsions CLK soient appliquées. Le schéma de circuit du compteur de sonneries est montré ci-dessus. Ce circuit peut être conçu avec des 4-FF, de sorte que le modèle de données recommencera après chaque impulsion 4-CLK, comme indiqué dans la table de vérité suivante. Généralement, ce compteur est utilisé pour l'auto-décodage, il n'y a pas de décodage supplémentaire n'est pas nécessaire pour décider de l'état du compteur.
| Presse CLK | Q1 | Q2 | Q3 | T4 |
0 | 1 | 0 | 0 | 1 |
1 | 1 | 1 | 0 | 0 |
deux | 0 | 1 | 1 | 0 |
| 3 | 0 | 0 | 1 | 1 |
Compteur Johnson
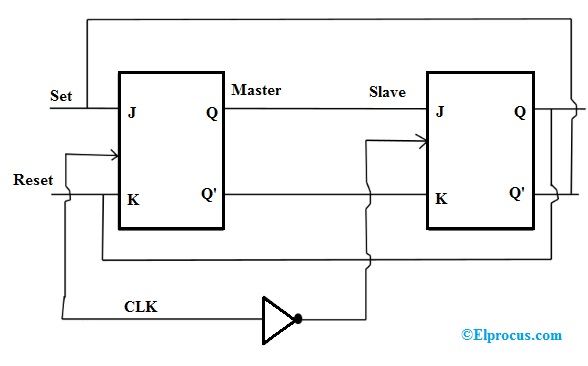
Fondamentalement, il s'agit d'un compteur de registre à décalage dans lequel la première sortie FF peut être associée au deuxième FF et ainsi de suite et la sortie inversée de la dernière bascule peut être à nouveau renvoyée à l'entrée de la première bascule.

Compteur Johnson
Le schéma de circuit du Compteur Johnson est illustré ci-dessus, et ce circuit peut être conçu avec des bascules 4-D. Un compteur Johnson avec n étages diffère une série de calcul de 2n états différents. Parce que ce circuit peut être construit avec des 4-FF, et le modèle de données fera à nouveau chaque impulsion 8-CLK comme indiqué dans la table de vérité suivante.
Presse CLK | Q1 | Q2 | Q3 | T4 |
0 | 0 | 0 | 0 | 1 |
| 1 | 0 | 0 | 0 | 0 |
deux | 1 | 0 | 0 | 0 |
| 3 | 1 | 1 | 0 | 0 |
4 | 1 | 1 | 1 | 0 |
| 5 | 1 | 1 | 1 | 1 |
6 | 0 | 1 | 1 | 1 |
| sept | 0 | 0 | 1 | 1 |
Le principal avantage de ce compteur est qu'il nécessite un nombre n de FF évalués vers le compteur en anneau pour déplacer une donnée donnée afin de produire une série de 2n états.
Applications des registres à décalage
Le applications de registre à décalage inclure les éléments suivants.
- Le principal avantage de ce compteur est qu'il nécessite un nombre n de FF évalués vers le compteur en anneau pour déplacer une donnée donnée afin de produire une série de 2n états.
- Un registre à décalage PISO est utilisé pour convertir des données parallèles en données série.
- Les registres à décalage SISO et PIPO sont utilisés pour générer un retard vers les circuits numériques.
- Ces registres sont utilisés pour le transfert, la manipulation et le stockage de données.
- Le registre SIPO est utilisé pour convertir des données série en parallèle, donc dans les lignes de communication
Ainsi, il s'agit de la registres à décalage les plus largement utilisés. Il s'agit donc des registres à décalage les plus largement utilisés, et ce sont des circuits logiques séquentiels, utilisés pour stocker et transférer les données. Ces registres peuvent être construits avec des bascules et la connexion de ceux-ci peut être faite de telle manière que l'un FF (bascule) o / p puisse être connecté à l'entrée de la bascule suivante, en fonction du type de registres en cours de formation. Voici une question pour vous, que sont u registres à décalage universels ?