
Une Système embarqué est l'une des plus grandes catégories de projets solo qui s'adressent particulièrement aux étudiants en électronique et en génie électrique. Les projets IEEE sur les systèmes embarqués peuvent varier de concepts relativement simples à des projets assez complexes. Également avec les projets IEEE sur les systèmes embarqués, il existe de nombreuses alternatives en termes de taille et de caractéristiques du microprocesseur et du microcontrôleur utilisés. Dans IEEE, nous découvrons divers microcontrôleurs tels que ARM, AVR, PIC 16/18, Coldfire et un certain nombre d'autres microcontrôleurs adaptés à un type de projet particulier.
Derniers projets IEEE sur les systèmes embarqués
Le dernier projets innovants embarqués sont discutés ci-dessous. Le suivant projets embarqués intéressants sont utiles pour les étudiants en génie.

Projets IEEE sur les systèmes embarqués
- Parking automatisé basé sur la vision.
- Simulation de tremblements de terre et de tsunami via le réseau GSM
- Contrôleur de feux de signalisation intelligent utilisant le GSM
- Conception et mise en œuvre d'un système de sécurité basé sur un capteur PIR
- Contrôle du robot avec alerte vocale et écran tactile.
- Contrôleur de panneau solaire et optimisation de l'alimentation
- Automatisation d'aéroport utilisant le GSM.
- Convertisseur de puissance bidirectionnel pour vélo électrique avec fonction de charge
- Nœud de capteur sans fil pour détecter un gazoduc dangereux
- Robot de prélèvement automatique de livres pour bibliothèques
Voyons maintenant l'importance des projets IEEE énumérés ci-dessus sur les systèmes embarqués en détail comme l'introduction, la description, le matériel et les composants logiciels.
Système de stationnement automatisé basé sur la vision
Le stationnement est un gros problème dans le scénario actuel, étant donné que le nombre de voitures augmente de jour en jour, par contre, les places de stationnement sont restreintes. On perd beaucoup de temps à chercher une place de parking. Ce projet dépeint une approche pour conquérir ces circonstances de contrôle et de gestion d'une place de parking en mettant en jeu un système de parking automatique basé sur la vision.
Les composants matériels et logiciels sont
- Pour formuler ce système automatisé de stationnement de voiture, nous utilisons une caméra Web
- Ordinateur personnel
- Lecteur RFID
- Étiquette RFID
- Moteur pas à pas
- Clé
- Écran LCD
- Dernier point mais non le moindre, un microcontrôleur ARM7
- LED
- Flash magique
- POINT NET
- Compilateur Keil
- Embarqué C
Description
La caméra Web utilisée fournira les informations sur la disponibilité de l'espace et ces données seront stockées dans le PC. Les écrans LCD afficheront les informations à l'aide d'un microcontrôleur utilisé. Lorsqu'une personne vient pour se garer, elle peut rechercher des places disponibles. Ensuite, le PC enverra toutes les informations au microcontrôleur et le contrôleur enverra les informations à l'écran LCD, où la personne peut voir la disponibilité. Si de l'espace est disponible, la porte s'ouvrira automatiquement ou restera fermée.
Simulation des tremblements de terre et des tsunamis via le réseau GSM
En raison du tremblement de terre et du tsunami, une grande quantité de destruction se produit et la population meurt chaque année. Ces calamités naturelles ne donnent jamais d'alerte avant de se produire. Pour éviter cette destruction et ces morts, nous construisons un projet qui alertera le public sur les tremblements de terre, les tsunamis, etc. Cette simulation de calamité naturelle se fera à l'aide de la technologie GSM.
Les composants matériels et logiciels sont
- Microcontrôleur –P89V51RD2
- GSM (module système global)
- Convertisseur ADC / analogique-numérique
- Accéléromètre
- Avertisseur sonore
- Affichage LCD
- Flash magique
- Embarqué C
- Compilateur Keil
Description
Ce système continue à surveiller les vibrations de la terre causées à chaque seconde de la journée, dans le cas où la vibration de la terre franchit le seuil, ce système produit un signal, alertant ainsi le public. Lorsque le tremblement de terre a lieu, le signal est produit et l'accéléromètre est stimulé et le signal est transmis tout au long de l'ADC au microcontrôleur. Ces signaux sont générés dès que possible. En raison du signal rapide, il existe une possibilité de fausse alarme.
Mais dans ce projet de stimulation, nous mettons en jeu 2 accéléromètres situés à deux à trois mètres l'un de l'autre. Lorsque le microcontrôleur reçoit les mêmes signaux des deux accéléromètres, il donne un message sur les informations relatives au tremblement de terre. Lorsqu'une alerte sur le tremblement de terre est détectée par ce système, il diffuse ces valeurs discrètes d'intensité de tremblement de terre à un emplacement central en utilisant la technologie GSM. Ces données sont ensuite affichées sur les écrans LCD. À la même alerte, le buzzer commence à bourdonner.
Conception d'un contrôleur intelligent de feux de signalisation utilisant le GSM et le système intégré
En règle générale, le contrôle des feux de circulation est nécessaire pour les villes à forte population comme Delhi, Mumbai, Bangalore. Parfois, les embouteillages sont si longs que l'agent de la circulation est incapable d'entendre la sirène d'une ambulance, par conséquent, l'ambulance doit attendre longtemps et pour cette raison, tout incident peut être causé par le patient. Donc ce projet nous aide à vaincre cette situation.
Les composants matériels et logiciels sont
- Microcontrôleur (de 8051 familles) - P89V51RD2
- Comparateur LM358
- Écran LCD 16X2
- LED rouges et vertes
- Capteur IR
- GSM
- Flash magique
- Capture d'Orcad
- Keil - compilateur C
Description
Pour garder un contrôle sur la densité du trafic, nous utilisons quelques capteurs IR sur le bord des routes et sur les informations données par les capteurs IR et la densité du trafic, les feux de signalisation changeront. Le capteur envoie toutes les informations à un comparateur pour numériser les informations fournies.

Contrôleur de feux de signalisation utilisant un système GSM et intégré
Si le premier capteur IR est bloqué, le feu de signalisation s'allumera en vert pendant environ 10 secondes, lorsque le deuxième capteur IR est bloqué par le trafic, le signal sera vert pendant 15 secondes et les horaires seront également affichés sur l'écran LCD attaché. En cas d'ambulance à proximité d'un signal lors d'une situation d'urgence, l'écran LCD doit envoyer une information de numéro par défaut au point central via la technologie GSM, en conséquence, le signal sera bientôt vert pendant environ 20 secondes.
Conception et mise en œuvre d'un système de sécurité basé sur un capteur infrarouge pyroélectrique
La sécurité de votre véhicule, de votre maison et de votre bureau est très importante de nos jours. Par conséquent, ce projet est développé avec un système de sécurité activé avec une fonction de détection de mot de passe et de mouvement. En mettant en jeu une technologie GSM l'administrateur sera mis à jour avec les mouvements se déroulant dans vos locaux, cette information est véhiculée à l'aide de SMS. L'administrateur est autorisé à agir de n'importe où, ce qui permet de gagner du temps en cas d'urgence.
Les composants matériels et logiciels sont
- Capteur PIR
- Avertisseur sonore
- Décodeur et encodeur DTMF
- Écran LCD alphanumérique
- Microcontrôleur - P89V51RD2
- Module GSM
- Capture d'Orcad
- Compilateur Keil
- Flash magique
- Langage C intégré
Description
Ce projet est créé par un système de sécurité à faible coût qui est activé avec un petit capteur PIR (Pyroelectric Infrared) qui est attaché au microcontrôleur. Ce capteur PIR tire parti des avantages de la polyélectricité pour détecter le corps humain. Car le corps humain est une source constante de rayonnement infrarouge passif. Le mécanisme du projet détecte l’existence du corps humain par les signaux produits par le capteur PIR.
Dans le cas de la détection d'un individu suspect dans des zones restreintes, le système produit une alarme d'alerte avec un appel à un numéro spécifié en utilisant le modem GSM. Ce système est activé avec un capteur de fumée qui alerte en cas d'incendie. Cette approche extrêmement réactive a une petite contrainte de calcul, par conséquent, elle est bien adaptée à l'examen minutieux, aux applications industrialisées et aux environnements intelligents. Le microcontrôleur utilisé dans le système contrôle l'ensemble du mécanisme du projet et est ainsi considéré comme le cœur du projet.
Commande de robot à écran tactile avec alerte vocale
Dans la croissance technologique actuelle, la télécommande est très importante pour l'automatisation des produits utilisateurs et industrialisés et en complément des applications SPACE ou Défense. XBEE est un élément essentiel qui joue ici un rôle fondamental. Une télécommande sans fil automatique intégrée au micro-ordinateur délimite les blocs structurels de base du mécanisme de sécurité sans fil remplaçant l'ancienne technologie filaire.
Les composants matériels et logiciels sont
- ZIGBEE
- Unité vocale
- Moteurs à courant continu
- Microcontrôleur - P89V51RD2
- Pilote de moteur à courant continu
- Écran tactile
- Source de courant
- roues
- Compilateur Keil
- Embarqué C
- Flash magique
Description
Ce projet de commande de robot à écran tactile avec alerte vocale met en jeu le microcontrôleur P89V51RD2. Cette mission est la meilleure dans le domaine des médicaments. Cet émetteur est situé près du patient et le patient utilise le robot pour déplacer et envoyer des informations au médecin en utilisant l'écran tactile. Dans les situations où le patient ne peut pas joindre le médecin, à ce moment, le patient envoie toutes ses informations avec le robot.
Le patient déplace le robot vers la gauche, la droite, l'avant et l'arrière à l'aide d'un écran tactile. Sur le clavier, un message vocal prédéfini est entré dans chaque touche et lorsque le patient appuie sur la touche, un message pré-entré est donné au médecin. Le médecin peut désormais agir selon les informations fournies. Le robot est intégré au récepteur. Ici, nous communiquons avec l'aide de Xbee.
Contrôleur de panneau solaire à axe unique et optimisation de la puissance
Généralement, tous les panneaux solaires ordinaires sont confrontés d'un côté ou d'une direction. Pour cette raison, le panneau solaire n'obtient pas suffisamment de rayons solaires pour fonctionner efficacement. Ce projet de panneau solaire à axe unique vise simplement à vaincre cette inefficacité des panneaux solaires. Ce projet mettra en jeu la technologie LDR qui aidera le panneau solaire à capter les rayons du soleil de toutes les directions.
Les composants matériels et logiciels sont
- LDR
- 8051 Microcontrôleur P89V51RD2
- Relais
- Panneau DEL
- Panneau solaire
- Moteur pas à pas
- Flash magique
- Langage C intégré
- Compilateur Keil
Description
Ce projet est conçu dans le but d'obtenir un contrôle automatique du panneau solaire, ce qui permettra d'obtenir des rayons solaires complets de toutes les directions. Ceci est réalisé en donnant un mouvement ou une valeur de rotation au panneau solaire. Le soleil se lève à l'est et se couche à l'ouest, par conséquent, dans un panneau solaire ordinaire, les rayons du soleil collectés proviennent soit de l'extrémité est, soit de l'extrémité ouest, donc pour surmonter cela, une puissance de rotation est donnée afin que les rayons soient collectés de l'est et de l'ouest tous les deux.

Panneau solaire à axe unique
La puissance de rotation est donnée au panneau en utilisant un moteur pas à pas. 5 LDR sont placés à l'arc et en fonction de l'intensité du LDR, le moteur pas à pas tournera. L’intensité du LDR sera moindre là où l’intensité du soleil est plus en utilisant ce principe, il fonctionnera.
LDR optimisera également la capacité de puissance. ADC affichera toutes les lectures données par le LDR et cette lecture sera transmise au microcontrôleur du 8051 des familles. Selon la lecture lancée par l'ADC, le microcontrôleur à l'aide du relais allume la LED. Si la puissance de la lueur est plus élevée, cela signifie que toutes les séries de LED seront éteintes. Selon l'intensité de la série LED Glow sera allumé ou éteint. Dans ce projet, le microcontrôleur est le cœur du système complet.
Automatisation d'aéroport basée sur le GSM
Ce projet basé sur le GSM est utilisé dans les aéroports. A l'heure de départ des vols, il faut garder à l'esprit un certain nombre de choses telles que: la collecte des bagages, le dégagement de piste, etc. En fonction de tous ces aspects, nous avons planifié ce projet pour l'aéroport.
Les composants matériels et logiciels sont
- Module GPS
- docteur moteur
- LED
- Capteur d'obstacle IR
- Récepteur et émetteur IR
- Pilote de moteur à courant continu L293D
- LCD alphanumérique 16 × 2
- Microcontrôleur AT89C52
- Capture d'Orcad
- Hyper Terminal
- Embarqué C
- Flash magique
- Compilateur Keil
Description
Dans la situation actuelle, lors de l'atterrissage d'un aéronef, une confirmation vocale est envoyée par le contrôleur de la circulation aérienne (ATC) au pilote. Après l'atterrissage de l'engin, l'avion est escorté jusqu'au parking où les passagers sont autorisés à sortir et à récupérer leurs bagages. Tous les appareils utilisés dans le salon sont accessibles manuellement, ce qui entraîne un gaspillage d'énergie et de temps. Il existe de nombreux risques d'accidents ainsi que des erreurs humaines.
Dans ce projet, nous vérifions la piste avant l'atterrissage, pour cela, nous avons placé le récepteur IR et l'émetteur IR face à face des deux côtés de la piste. Le pilote est invité à envoyer le message d'atterrissage à la station de base. Si la piste est libre, la station de base enverra un message d'atterrissage au pilote par technologie GSM. Dans cette affectation, l'atterrissage de l'avion est indiqué par une LED (objectif de démonstration).
Une fois que les escaliers mécaniques d'atterrissage ont été envoyés pour cela, nous utilisons un moteur à courant continu (objectif de démonstration). Nous plaçons également un capteur d'obstacle IR, ce capteur conduira les bagages sur la ceinture car il se rapproche du capteur pour cela, nous utilisons (à des fins de démonstration) un moteur à courant continu. Pour réussir ce projet, un microcontrôleur de 8051 familles est utilisé.
Conception et mise en œuvre d'un convertisseur de puissance bidirectionnel pour vélo électrique avec fonction de charge
Ces derniers temps, afin d'obéir aux exigences d'économie d'énergie, de réduction de carbone et de sécurité écologique, tous les engrenages électroniques et les énergies sont nécessaires pour satisfaire la demande verte. D'un autre côté, les gigantesques véhicules fioul provoquent une grave pollution de l'air et nuisent à l'environnement. Ainsi, la création des EV (véhicules électriques) ou des HEV (véhicules électriques hybrides) est en train de devenir un enjeu important dans de nombreux pays. Les batteries secondaires sont la principale source d'énergie pour ces véhicules électriques. Par conséquent, la gestion de l'énergie est un aspect clé essentiel des véhicules électriques hybrides ou de la conception de véhicules électriques.
Les composants matériels et logiciels sont
- Buck-Boost
- Diviseur de tension
- LCD
- Circuit de charge
- Batterie-12V
- Buck-Boost
- PIC18F458
- Kit PIC - Microchip
- MPLAB
- OR-CAD
Description
Dans ce projet de convertisseur de puissance bidirectionnel pour le vélo électrique, nous faisons fonctionner une machine à l'aide d'un pilote de moteur qui est activé par le microcontrôleur. Cette machine est attachée par un autre moteur. En raison de la combinaison, l'autre moteur se relaie et produit un retour EMF. Ce dos EMF produit est amplifié et utilisé pour charger la batterie.
Ici, un pilote de moteur est utilisé qui est activé par le microcontrôleur. Le moteur attaché se déplace lorsque le moteur principal se déplace, de sorte que la production d'EMF arrière démarre chaque fois que les machines bougent. L'EMF arrière ainsi produit est utilisé pour faire avancer le bloc où le bloc d'amplification fait avancer l'EMF arrière à 12Volts et la batterie est alimentée avec le même.
Pour présenter les tensions produites par la batterie et l'EMF arrière, un écran LCD est utilisé. La tension de la batterie en plus de l'EMF arrière sera plus élevée pour la fournir au microcontrôleur, de sorte qu'un séparateur de tension est utilisé qui divise la tension par 10, ce qui sera plus adéquat à calculer.
Nœud de capteur sans fil pour détecter les gazoducs dangereux
Ce projet explique les aspects de fonctionnement et de performance du nœud de capteur sans fil ARM7 en observant les paramètres tels que le CO2, l'humidité et la température entourant le pipeline. Pour détecter toute variation de ces paramètres, ce système est utilisé. Ce système utilise un capteur de nœud sans fil alimenté par batterie qui est interconnecté avec d'autres capteurs externes pour évaluer les paramètres.
Les composants matériels et logiciels sont
- Zigbee
- Capteur de CO2
- LCD
- Microcontrôleur
- Capteur de température et d'humidité
- Capture d'Orcad
- Hyper Terminal
- Embarqué C
- Flash magique
- Compilateur Keil
Description
Ce projet fonctionne avec un microcontrôleur ARM7, le seuil est saisi avec un niveau de paramètre prédéfini. Les capteurs utilisés donnent une sortie de tension analogique. Cette sortie fournie à l'ADC convertira la sortie analogique en numérique. Cette sortie numérique est évaluée dans le microcontrôleur.
Si l'humidité, la température et d'autres paramètres ne correspondent pas ou dépassent les niveaux prédéfinis, il enverra des informations au lieu de surveillance à l'aide de la technologie Zigbee. Tous les niveaux de paramètres détectés comme l'humidité, la température, etc. seront affichés sur l'écran LCD utilisé.
Robot de prélèvement automatique de livres pour bibliothèques
Pour rendre le système de bibliothèque automatisé, ce projet est prévu. Pour utiliser ce processus de recherche de livres dans la bibliothèque, nous mettons en jeu Robot Arm avec une certaine liberté, ce qui aidera à trouver le livre exact nécessaire.
Les composants matériels et logiciels sont
- LCD
- Microcontrôleur
- Zigbee
- Source de courant
- Pilotes de moteur
- Étiquettes et lecteur RFID
- Capteur IR
- Magie flash
- coin
Description
Dans ce projet, tous les livres seront étiquetés par des étiquettes RFID et un lecteur d'étiquettes est activé dans le robot. Le robot effectuera une recherche de force de la bête et au cas où le livre serait localisé, le bras du robot sera abaissé jusqu'à ce que le capteur d'obstacles IR situé dans le bras trouve le livre.

Robot de cueillette de livres
Plus tard, le bras du robot saisira le livre avec ses mâchoires, puis le robot se déplacera dans la direction opposée pour placer le livre là où il a commencé. Une technologie similaire peut être appliquée dans les supermarchés.
La liste de quelques autres projets IEEE sur les systèmes embarqués pour les étudiants de l'EPE est présentée ci-dessous.
Robot auto-équilibrant avec double roue autonome utilisant un microcontrôleur
La fonction principale de ce robot auto-équilibrant à deux roues est d'équilibrer sa position dans la région d'une position fixe. À l'origine, ce système était instable et non linéaire. Une fois que la structure physique de ce système est modifiée à l'aide d'un contrôleur PID, il devient stable et son comportement dynamique peut être analysé grâce à sa modélisation mathématique. Les résultats de simulation de ce système peuvent être observés via MATLAB, PROTEUS & VM Lab. Ce projet est très utile dans les systèmes de défense, les hôpitaux, le jardinage et les centres commerciaux, etc.
Sécurité de la communication des informations du véhicule
Ce projet met en œuvre un système pour fournir des informations sur le véhicule ainsi que la sécurité à l'aide des technologies GSM et RFID. Dans ce projet, un système de suivi des véhicules est développé pour fournir des informations aux voyageurs à l'intérieur des véhicules à l'aide de la technologie sans fil afin qu'il aide à reconnaître si le voyageur est vivant ou mort. Pour surmonter cela, ce système est développé pour éviter les accidents des conducteurs et des passagers.
Voiture autonome ou autonome
Ce projet conçoit une voiture autonome pour réduire les accidents de la route. Ce projet surmonte le problème trépidant auquel sont confrontés les habitants des zones urbaines comme le système de stationnement en modifiant l'utilisation du terrain. Ces voitures autonomes peuvent développer des problèmes de stationnement pour certaines raisons. Ce véhicule peut déposer des voyageurs à peu près n'importe où dans les zones urbaines. Cette voiture autonome peut se garer dans une zone de stationnement plus étroite sans endommager le véhicule.
Système de surveillance des déchets avec IoT
À l'heure actuelle, il existe plusieurs méthodes pour nettoyer et améliorer l'environnement de notre région. Le gouvernement a également lancé divers mouvements pour améliorer la propreté. Ce projet met en œuvre un système pour informer les corporations municipales de nettoyer le bac à poussière à temps.
Pour surmonter ce problème, une surveillance des déchets est développée. Dans ce projet, un capteur est situé en haut de la poubelle pour remarquer le remplissage des ordures à la taille de la chouette de la poubelle. Une fois que les ordures sont remplies au plus haut niveau, un avis sera immédiatement envoyé au bureau de la municipalité, afin que d'autres mesures puissent être prises pour vider le bac. Ce projet est donc très utile pour mieux nettoyer la ville dans les zones urbaines. En utilisant ce projet, le fonctionnement manuel peut être réduit car ils recevront une notification une fois la corbeille remplie.
Système de surveillance sans fil pour la sécurité des mines
Ce projet est utilisé pour mettre en œuvre un système permettant de surmonter les inconvénients du système radio en utilisant la technologie sans fil pour suivre la mine. Pour cela, chaque personne est équipée d'un module RF Tx en entrant dans une mine. Chaque émetteur-récepteur situé dans la mine s'occupe de l'emplacement du mineur.
Les émetteurs-récepteurs de ce système utilisent un module sans fil pour interagir avec les stations de base.
Ce système utilise différents capteurs tels que l'humidité, la température pour intimer les mineurs et la station de base lorsque le changement dans l'atmosphère se produit. Les positions en temps réel de chaque mineur peuvent être surveillées par les opérateurs de la mine en cas d'urgence. Ces systèmes sont polyvalents, hautement fiables, moins coûteux et utilisent moins d'énergie.
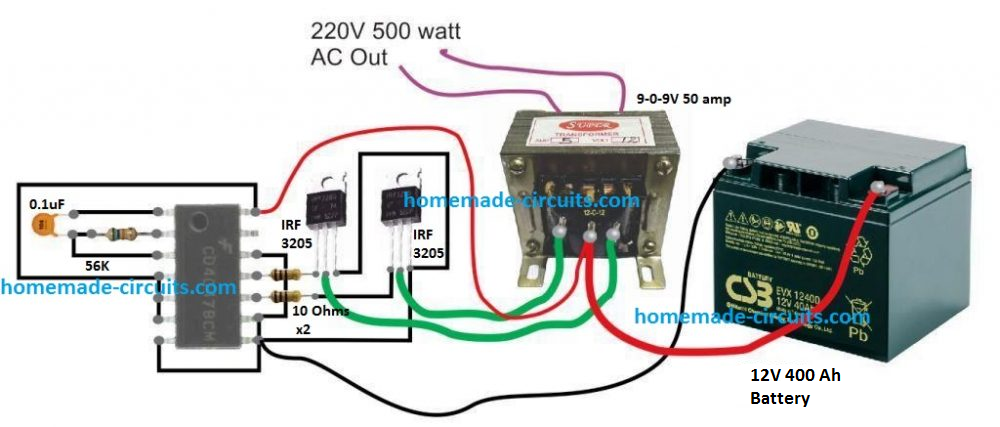
Système de gestion de batterie utilisant UPS et GSM
Ce projet est utilisé pour donner l'alimentation de secours aux entreprises, industries une fois que l'alimentation principale est coupée ou ne fonctionne pas. En fournissant la fourniture de secours aux organisations, les services fournis par l'entreprise ne peuvent pas être interrompus. Ce système utilise deux transformateurs, l'un est destiné à l'alimentation principale tandis que l'autre est UPS. Si une personne souhaite utiliser l'alimentation UPS, elle doit envoyer un SMS au modem GSM.
Une fois que le modem reçoit un SMS de la personne pour modifier la connexion de l'alimentation électrique, il envoie une alerte au microcontrôleur pour connecter l'onduleur et déconnecter l'alimentation principale à l'aide du circuit de commande à l'aide d'un relais.
En utilisant ce projet, les interruptions de courant survenues par l'alimentation principale peuvent être évitées. Si l'alimentation principale n'est pas disponible, nous pouvons utiliser l'alimentation secondaire en informant le microcontrôleur.
Regardez les autres projets IEEE suivants sur les systèmes embarqués
- Contrôle du gradateur de lampe CA via téléphone portable.
- Circuit de surveillance sans fil pour panneaux photovoltaïques dans les systèmes connectés au réseau.
- Implémentation SCADA basée sur RF.
- Mesure de la qualité de l'alimentation et développement du dispositif de surveillance.
- Enregistreur de données de température.
- Système de surveillance et de contrôle des compteurs d'énergie.
- Street Light basé sur Zigbee.
- Un système de surveillance de la température en ligne
- Un système de surveillance en ligne du dégivrage d'un conducteur de ligne de transport
Il s'agit donc de la liste des projets IEEE sur les systèmes embarqués. Les systèmes embarqués sont un domaine d'apprentissage extrêmement large qui nécessite une connaissance approfondie des projets en temps réel pour aider les aspirants à comprendre l'importance du domaine dans le domaine de l'électronique. Les systèmes embarqués sont aujourd'hui fonctionnels sur un certain nombre d'appareils électroniques. Il n'y a que quelques projets qui obtiennent l'acceptation IEEE et ces projets IEEE reconnus sur les systèmes embarqués vont comme des petits pains en ce qui concerne leur demande.
Crédits photo
- Contrôleur de feux de signalisation utilisant un système Gsm et intégré par Staticflickr
- Panneau solaire à axe unique par oldcastleprecast
- Livre Picking Robot par jhu





{kind=link}
{kind=link}