
CAN ou Controller Area Network est une technologie de réseau série haut débit semi-duplex à deux fils. Il est essentiellement utilisé dans la communication entre différents appareils dans une région à faible rayon, comme dans une automobile. Un protocole CAN est un protocole CSMA-CD / ASM ou des arbitrages de détection de collision à accès multiple par détection de porteuse sur le protocole de priorité de message. CSMA garantit que chaque nœud doit attendre une période donnée avant d'envoyer un message. La détection de collision garantit que la collision est évitée en sélectionnant les messages en fonction de leur priorité prescrite.
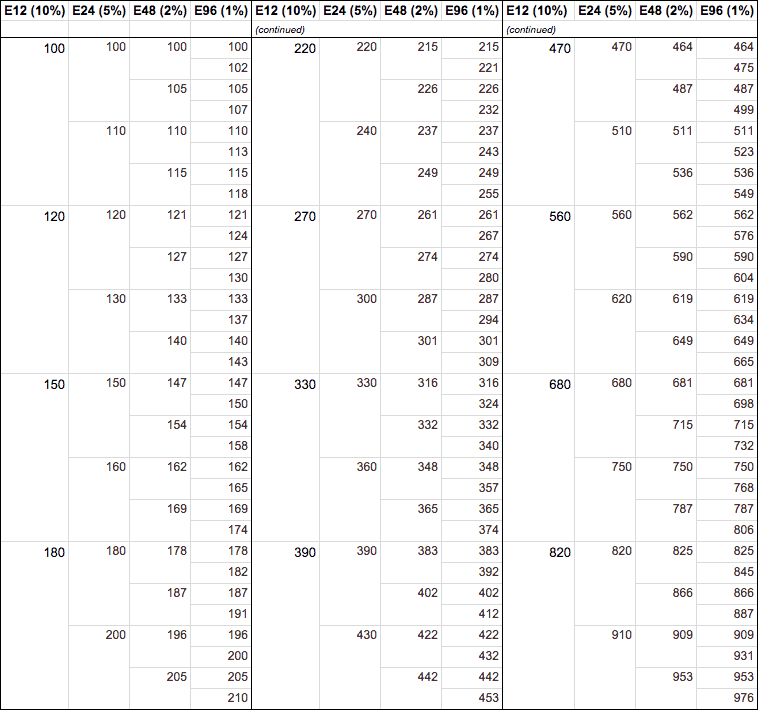
Il fournit un débit de signalisation de 125 kbps à 1 Mbps. Il prévoit 2048 identificateurs de messages différents.
Il s'agit de la norme ISO-11898 et utilise le modèle d'interconnexion de systèmes ouverts à 7 couches.
L'histoire:
Il a été développé par Robert Bosch en 1982 et officiellement publié par la Detroit’s Society of Automotive Engineers en 1986. La première voiture intégrant un bus CAN a été fabriquée par Mercedes Benz en 1992.
Architecture ISO 11898:

Source de l'image - theremino
L'architecture en couches se compose de trois couches
- Couche d'application : Il interagit avec le système d'exploitation ou l'application du périphérique CAN.
- Couche de liaison de données : Il connecte les données réelles au protocole en termes d'envoi, de réception et de validation des données.
- Couche physique : Il représente le matériel réel.
La trame CAN standard se compose des bits suivants:
 La trame CAN standard se compose des bits suivants:
La trame CAN standard se compose des bits suivants:
- SOF- Début de Fr ame. Le message commence à partir de ce point.
- Identifier : Il décide de la priorité du message. Baissez la valeur binaire, plus la priorité est élevée. C'est 11 bits.
- RTR - Demande de transmission à distance. Il est dominant lorsque des informations sont requises d'un autre nœud. Chaque nœud reçoit la demande, mais seul le nœud dont l'identifiant correspond à celui du message est le nœud requis. Chaque nœud reçoit également la réponse.
- ICI - Extension d'identification unique. S'il est dominant, cela signifie qu'un identifiant CAN standard sans extension est transmis.
- R0 - bit réservé.
- DLC - Code de longueur des données. Il définit la longueur des données envoyées. C'est 4 bits
- Données - Jusqu'à 64 bits de données peuvent être transmis.
- CRC - Contrôle de redondance cyclique. Il contient la somme de contrôle (nombre de bits transmis) des données d'application précédentes pour la détection d'erreur.
- HÉLAS - Accuser réception. C'est pour 2 bits. Il est dominant si un message précis est reçu.
- EOF - fin du cadre. Il marque la fin du cadre de la boîte et désactive le bourrage de bits.
- IFS - Espace inter-trames. Il contient le temps nécessaire au contrôleur pour déplacer une trame correctement reçue vers sa position correcte.
5 Différents types de messages sont:
- Trame de données : Il se compose d'un champ arbitraire, d'un champ de données, d'un champ CRC et des champs d'acquittement.
- Cadre à distance : Il demande la transmission de données depuis un autre nœud. Ici, le bit RTR est récessif.
- Trame d'erreur : Il est transmis lorsqu'une erreur est détectée.
- Cadre de surcharge : Il est utilisé pour fournir un délai entre les messages. Il est transmis lorsque les nœuds deviennent trop occupés.
- Cadre valide : Un message est valide si le champ EOF est récessif. Sinon, le message est à nouveau transmis.
Couche physique CAN:
Bus CAN

Source de l'image - digital.ni
Il se compose d'une liaison série à deux fils - CAN_H et CAN_L et leurs niveaux de tension les uns par rapport aux autres déterminent si un 1 ou un 0 est transmis. C'est une signalisation différentielle. Le courant circulant dans chaque ligne de signal est égal mais dans la direction opposée, ce qui entraîne un effet d'annulation de champ qui est la clé des émissions à faible bruit. Cela garantit une signalisation différentielle équilibrée qui réduit le couplage de bruit et permet un taux de transmission élevé sur les fils. Habituellement, les fils sont des câbles à paires torsadées avec une longueur de bus de 40 m et un maximum de 30 nœuds. C'est un câble blindé ou non blindé avec une impédance caractéristique de 120 Ohms.
CAN TRANSCEIVER:

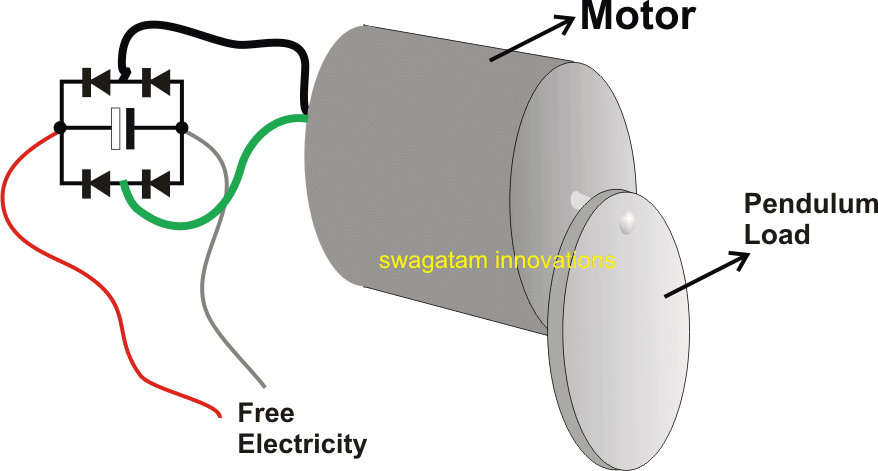
CAN pour les véhicules de Hugo Provencher. Les deux fils CANH et CANL sont normalement à 2,5 V déterminés par les deux transistors et la source de tension 2,5 V. Fondamentalement, la différence entre les deux fils doit toujours être de 0. La commande du pilote détermine la tension appliquée aux fils CANH et CANL. Lorsque les deux transistors sont conducteurs, la chute de tension aux bornes du 1sttransistor et la diode est de 1,5 V, ce qui permet au fil CANH de tirer jusqu'à 3,5 V. La chute de tension sur les 2ndtransistor et la diode est de 1 V, ce qui fait descendre le fil CANL à 1,5 V. Les diodes sont utilisées pour la protection haute tension. Le récepteur est un circuit discriminateur qui donne une sortie de 1 lorsque les deux entrées CANH et CANL sont identiques et une sortie de 0 si les deux entrées sont différentes. Le bloc dominant TXD est utilisé pour la protection contre les défauts à la terre et le bloc d'arrêt thermique désactive le contrôle du pilote si les diodes et les transistors surchauffent.
Avantages de CAN:
- Cela réduit le câblage puisqu'il s'agit d'une commande distribuée et cela garantit l'amélioration des performances du système.
- De nombreux fabricants de puces CAN ont fourni la couche de liaison de données et la couche physique interfacées avec la puce et tout ce que le développeur de logiciels doit faire est de développer le codage de l'application.
- Il offre la possibilité de travailler dans différents environnements électriques et assure une transmission sans bruit.
- La congestion du trafic est éliminée car les messages sont transmis en fonction de leur priorité et cela permet à l'ensemble du réseau de répondre aux contraintes de synchronisation.
- Il permet une transmission sans erreur car chaque nœud peut vérifier les erreurs lors de la transmission du message et envoyer la trame d'erreur.
Exemple de travail CAN:
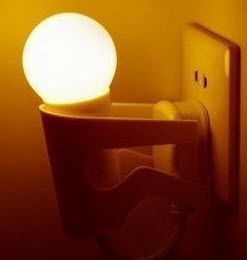
Le Controller Area Network a de vastes applications dans l'industrie ainsi que dans les véhicules. L'une des principales applications concerne la communication entre les différents appareils d'un véhicule. Un autre peut être parmi différents microcontrôleurs, supposons pour détecter un mot de passe, utilisé pour répondre à toutes les exigences telles que l'ouverture d'une porte verrouillée à l'aide d'un mot de passe ou l'allumage d'une ampoule, etc.

Circuit de réseau de zone de contrôleur
L'application de base se compose de 3 microcontrôleurs communiquant entre eux à l'aide de deux fils comme dans un réseau CAN. Le 1stle microcontrôleur est interfacé avec un clavier, le 2ndavec un écran LCD, et le troisième avec un buzzer et un relais actionnant une lampe. Lorsqu'un mot de passe est saisi sur le clavier, le 2ndle microcontrôleur agit comme un récepteur et reçoit le message transmis bit par bit du 1stémetteur et affiche le message sur l'écran LCD. Lorsque tout le message est transmis, le 2ndle microcontrôleur effectue la vérification et si le mot de passe est erroné, il envoie un signal au 3rdle microcontrôleur, qui à son tour envoie un buzzer, est activé avec ce signal. Lorsque le mot de passe est correct, le 3rdle microcontrôleur allume le relais qui à son tour allume la lampe.





{kind=link}
{kind=link}