
Introduction aux systèmes embarqués
Le système dans lequel l'objectif dédié du logiciel est intégré dans une conception matérielle est appelé système embarqué. Ce système peut être un système indépendant ou un système plus grand. Le logiciel est généralement intégré dans modules de mémoire comme ROM, et il n'a pas besoin de mémoire secondaire comme dans un ordinateur. Télécom, cartes à puce, missiles, réseaux informatiques, électronique grand public numérique et les satellites font partie des applications des systèmes embarqués.

Applications de systèmes embarqués
Applications de systèmes embarqués comprennent la robotique, les appareils photo numériques, les jouets multitâches, les systèmes de cuisson et de lavage, les systèmes biomédicaux, les contrôleurs de clavier, les téléphones mobiles et intelligents, les systèmes informatiques, le système électronique d'affichage de poids intelligent et les systèmes de divertissement, tels que les vidéos, les jeux, jeux vidéo, etc.
Processus de conception de système intégré peut être effectué d'abord par simulation, qui est utilisée pour tester le circuit car le changement de matériel devient très difficile en cas de dysfonctionnement du circuit. Si les résultats correspondent à ceux souhaités, le processus sera conçu de manière permanente par des processus séquentiels sur plaquettes.
Bases des systèmes embarqués
Les systèmes intégrés sont conçus pour effectuer des tâches spécifiques, mais ne peuvent pas être utilisés comme ordinateurs à usage général pour effectuer différentes tâches. Le logiciel du système intégré est normalement appelé micrologiciel, qui peut être stocké sur un disque ou sur une seule puce. Les deux principaux éléments des systèmes sont:
- Matériel système intégré
- Logiciel système intégré

Matériel et logiciel du système intégré
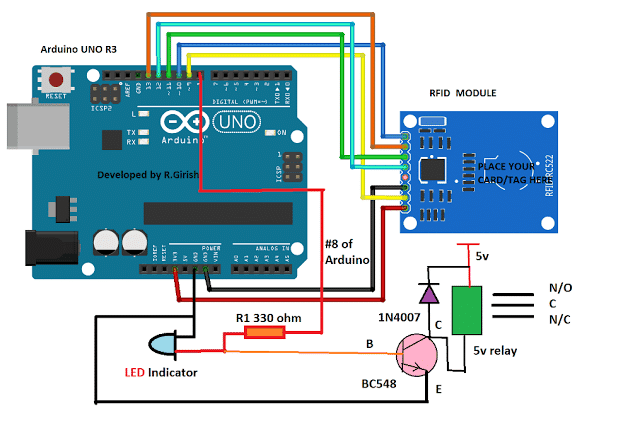
Matériel système intégré : Un système embarqué nécessite une plate-forme matérielle pour interagir avec diverses entrées et sorties ou variables en temps réel. Le matériel comprend un contrôleur comme microcontrôleur ou microprocesseur , modules de mémoire, interfaces d'E / S, systèmes d'affichage et modules de communication, etc.
Logiciel système intégré : Ce logiciel permet la programmation de la manière souhaitée de telle sorte qu'il contrôle diverses opérations. Il est écrit dans un format de haut niveau, compilé en code, puis vidé dans des contrôleurs matériels.
Systèmes embarqués en temps réel sont des systèmes informatiques qui exécutent les actions, telles que la surveillance, la réponse et le contrôle des mouvements externes. L'environnement externe est connecté au système informatique via capteurs , actionneurs et interfaces E / S. Un système informatique réel intégré à un système informatique est appelé système intégré en temps réel. Un système embarqué en temps réel est utilisé dans différents domaines tels que l'armée, les secteurs gouvernementaux et le médical.
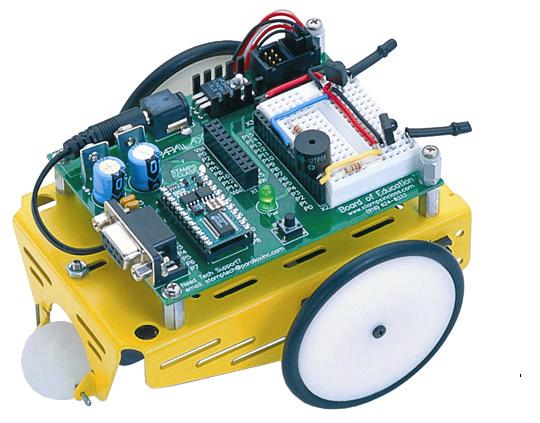
Projets robotiques en temps réel dans les systèmes embarqués
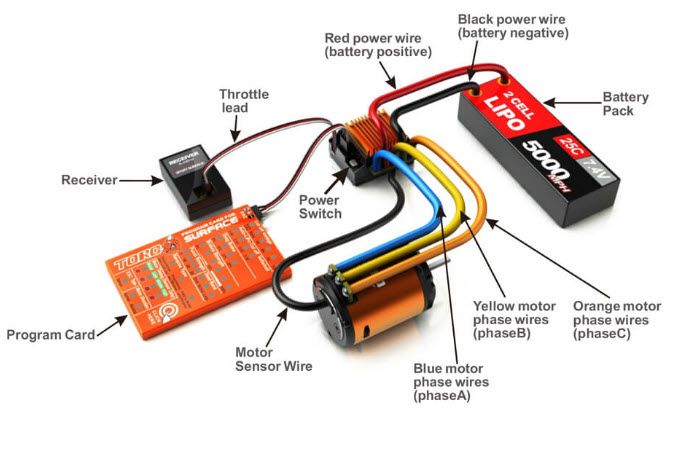
Systèmes embarqués peut être utilisé dans de nombreuses applications en temps réel telles que les automobiles, la robotique, les industries, etc. les projets en temps réel sont liés à la technologie robotique .
1. Véhicule robotique à commande vocale avec reconnaissance vocale longue distance
Le but de ce projet est de contrôler un véhicule robotique par commandes vocales pour un fonctionnement à distance. Une Microcontrôleur 8051 est utilisé avec un module de reconnaissance vocale pour effectuer l'opération souhaitée. Il utilise un microcontrôleur 8051, un module de reconnaissance vocale, un bouton poussoir, un module RF, un encodeur, un décodeur, un circuit intégré de commande de moteur, des moteurs à courant continu, des batteries et d'autres composants divers.

Véhicule robotisé à commande vocale - Émetteur
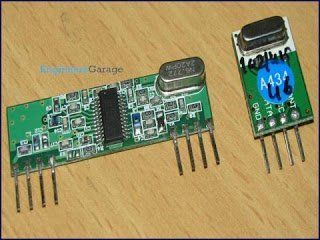
Les mouvements du véhicule comme la gauche, la droite, le haut et le bas peuvent être effectués à l'aide de boutons-poussoirs ou de commandes vocales par un module de reconnaissance vocale qui est interfacé avec le microcontrôleur. Ici, un encodeur est utilisé pour encoder les commandes données au microcontrôleur en utilisant l'émetteur RF pour transmettre les signaux à la fréquence de 433 MHz.
Par conséquent, lorsque les signaux qui émergent en appuyant sur des boutons, ou les signaux de commande vocale correspondant au mouvement sont reçus par le microcontrôleur, il envoie des signaux de commande au circuit récepteur à travers le module émetteur.

Récepteur de véhicule robotique à commande vocale
Lors de la réception de ces signaux, un récepteur RF transfère ces signaux à un circuit décodeur dans lequel les données binaires sont converties en un signal de niveau microcontrôleur. Par conséquent, le microcontrôleur effectue le mouvement souhaité à partir du circuit émetteur. Le module laser est interfacé avec le microcontrôleur pour détecter les opérations effectuées par le robot même dans les endroits sombres.
2. Véhicule robotique télécommandé à écran tactile pour la gestion du magasin
Ce projet consiste à contrôler un véhicule robotisé à l'aide d'un écran tactile unité pour fonctionnement à distance. Un panneau à écran tactile est placé à l'extrémité de l'émetteur et un robot pick-n-place est placé à l'extrémité du récepteur pour effectuer une tâche en répondant aux signaux. Les composants matériels utilisés dans ce projet comprennent un microcontrôleur 8051, un panneau à écran tactile, des antennes (côté émetteur-récepteur), un encodeur, un décodeur, des moteurs CC, un corps robotique, une batterie, etc.

Émetteur de véhicule robotisé à écran tactile
Comme discuté dans le module de reconnaissance vocale du projet ci-dessus, dans ce projet également un module d'écran tactile envoie les signaux de commande correspondant au mouvement du véhicule au microcontrôleur. Le contrôleur envoie ensuite ces signaux au codeur, puis à l'émetteur qui transmet finalement les signaux au circuit récepteur.

Récepteur de véhicule robotisé à écran tactile
L'antenne placée à l'extrémité du récepteur reçoit les signaux RF de l'antenne émettrice, décode les données, puis envoie ces données au microcontrôleur. Ce montage comporte quatre moteurs interfacés avec le microcontrôleur: deux moteurs pour le mouvement du bras et de la pince et les deux autres pour le mouvement du corps. Tous ces moteurs sont entraînés par un circuit intégré de commande de moteur qui reçoit en permanence les commandes du microcontrôleur.
Ce sont les deux applications de systèmes embarqués dans le domaine de la robotique. Les exemples en temps réel des systèmes embarqués vous auraient peut-être permis de mieux comprendre le concept des systèmes embarqués. Si vous avez d'autres doutes sur la mise en œuvre de ces projets, vous pouvez nous contacter en commentant ci-dessous.
Crédits photo
- Applications de systèmes embarqués oocités
- Matériel et logiciel du système intégré conception dca
![Circuit convertisseur 24 V à 12 V CC [utilisant un régulateur à découpage]](https://electronics.jf-parede.pt/img/3-phase-power/F1/24-v-to-12-v-dc-converter-circuit-using-switching-regulator-1.jpg)


{kind=link}