Dans ce projet, nous allons apprendre à créer un circuit de commande de moteur pas à pas unipolaire simple en utilisant un circuit intégré de minuterie 555. Outre la minuterie 555, nous avons également besoin d'IC CD 4017 qui est un IC à compteur de décennie.
Par Ankit Negi
Tout moteur unipolaire peut être connecté à ce circuit pour effectuer une tâche spécifique, bien que vous deviez d'abord faire quelques petits changements.
La vitesse du moteur pas à pas peut être contrôlée à partir d'un potentiomètre connecté entre la décharge et le seuil broche de 555 minuterie .
Principes de base du moteur pas à pas
Les moteurs pas à pas sont utilisés dans les zones où une quantité spécifique de rotation est requise, non réalisable avec des moteurs à courant continu ordinaires. Une application typique de moteur pas à pas est dans une IMPRIMANTE 3D. Vous trouverez deux types de moteurs pas à pas populaires: UNIPOLAR et BIPOLAR.
Comme son nom l'indique, le moteur pas à pas unipolaire contient des enroulements avec un fil commun qui peuvent être facilement alimentés un par un.
Alors que le moteur pas à pas bipolaire n'a pas de borne commune entre les bobines, car il ne peut pas être entraîné simplement en utilisant le circuit proposé. Pour piloter un moteur pas à pas bipolaire, nous avons besoin d'un circuit en pont en H.
COMPOSANTS:
1. 555 TIMER IC

2. CD 4017 IC

3. RÉSISTANCES 4.7K, 1K


4. POTENTIOMÈTRE 220K

5. 1 uf CONDENSATEUR

6. 4 DIODES 1N4007

7. 4 TRANSISTORS 2N2222

8. MOTEUR PAS À PAS UNIPOLAIRE

9. SOURCE D'ALIMENTATION CC
BUT DU 555 TIMER:
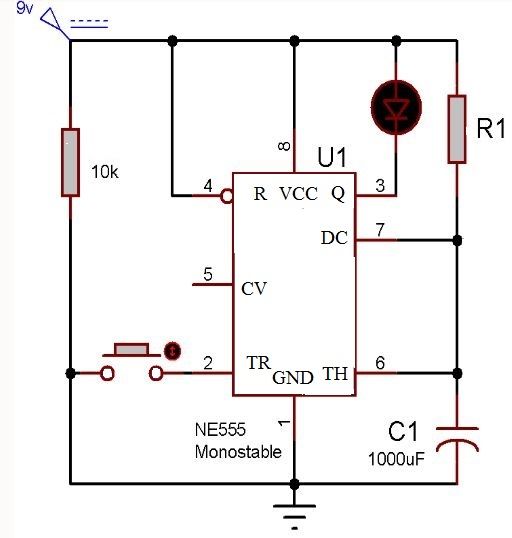
Une minuterie 555 est nécessaire ici pour générer des impulsions d'horloge de fréquence particulière (pouvant être modifiées en utilisant un potentiomètre 220k) qui détermine la vitesse du moteur pas à pas.
Détails du brochage IC 555

BUT DU CD4017:
Comme déjà mentionné ci-dessus, il s'agit d'un IC de compteur de décades, c'est-à-dire qu'il peut compter jusqu'à 10 impulsions d'horloge. Ce qui rend ce circuit intégré spécial, c'est qu'il possède son propre décodeur intégré. Grâce à cela, vous n'avez pas besoin d'ajouter un IC supplémentaire pour décoder les nombres binaires.
4017 compte jusqu'à 10 impulsions d'horloge de 555 heures et donne une sortie élevée correspondant à chaque impulsion d'horloge une par une à partir de ses 10 broches de sortie. À la fois, une seule broche est haute.
BUT DES TRANSISTORS:
Il y a deux objectifs de transistor ici:
1. Les transistors agissent ici comme des interrupteurs, activant ainsi une bobine à la fois.
2. Les transistors permettent à un courant élevé de passer à travers eux, puis dans le moteur, excluant ainsi complètement la minuterie 555 car elle peut fournir très peu de courant.
SCHÉMA:

Effectuez les connexions comme indiqué sur la figure.
1. Connectez la broche 3 ou la broche de sortie de la minuterie 555 à la broche 14 (broche d'horloge) de l'IC 4017.
2. Connectez la broche d'activation ou la 13e broche de 4017 à la terre.
3. Reliez les broches 3, 2, 4, 7 une par une aux transistors 1, 2, 3, 4 respectivement.
4. Connectez les broches 10 et 15 à la terre via une résistance de 1k.
5. Connectez le fil commun du moteur pas à pas au positif de l'alimentation.
6. Connectez les autres fils du moteur pas à pas de manière à ce que les bobines soient alimentées une par une pour effectuer correctement un tour complet (vous pouvez consulter la fiche technique du moteur fournie par le fabricant)
POURQUOI LA BROCHE DE SORTIE 10 DE L'IC 4017 EST-ELLE CONNECTÉE À SON PIN 15 (RESET PIN)?
Comme déjà mentionné ci-dessus, le 4017 compte les impulsions d'horloge une à une jusqu'à la 10e impulsion d'horloge et donne une sortie élevée sur les broches de sortie en conséquence, chaque broche de sortie passe à l'état haut.
Cela provoque un certain retard dans la rotation du moteur qui est inutile. Comme nous n'avons besoin que des quatre premières broches pour un tour complet du moteur ou des quatre premiers décimales de o à 3, la broche no. 10 est connecté à la broche 15 de sorte qu'après le 4ème comptage, le circuit intégré se réinitialise et le comptage recommence depuis le début. Cela garantit aucune interruption de la rotation du moteur.
TRAVAIL:
Après avoir fait les connexions correctement si vous allumez le moteur du circuit commencera à tourner par étapes. La minuterie 555 produit des impulsions d'horloge en fonction des valeurs de la résistance, du potentiomètre et du condensateur.
Si vous modifiez la valeur de l'une de ces trois composantes, la fréquence de l'impulsion d'horloge changera.
Ces impulsions d'horloge sont données à l'IC CD 4017 qui compte ensuite les impulsions d'horloge une par une et donnent 1 comme sortie à la broche n ° 3,2,4,7 respectivement et répète ce processus en continu.
Etant donné que le transistor Q1 est connecté à la broche 3, il commute d'abord puis le transistor Q2 suivi de Q3 et Q4. Mais lorsqu'un transistor est passant, tous les autres restent bloqués.
Lorsque Q1 est activé, il agit comme un interrupteur fermé et le courant circule à travers le fil commun vers le fil 1, puis vers la masse via le transistor Q1.
Cela alimente la bobine 1 et le moteur tourne à un certain angle qui dépend de la fréquence d'horloge. Ensuite, la même chose se produit avec Q2 qui alimente la bobine 2 suivie de la bobine 3 et de la bobine 4. Ainsi, un tour complet est obtenu.
Lorsque le potentiomètre est tourné:
Supposons que la position initiale du pot soit telle qu'il y ait une résistance maximale (220k) entre la décharge et la broche de seuil. La formule pour la fréquence de l'impulsion d'horloge de sortie est:
F = 1,44 / (R1 + 2R2) C1
Il ressort clairement de la formule que la fréquence des impulsions d'horloge diminue à mesure que la valeur de R2 augmente. Ainsi, lorsque la valeur de R2 ou du pot est maximale, la fréquence est minimale en raison de laquelle IC 4017 compte plus lentement et donne une sortie plus retardée.
Lorsque la valeur de la résistance R2 diminue, la fréquence augmente, ce qui entraîne un retard minimum entre les sorties de l'IC 4017. Et par conséquent, le moteur pas à pas tourne plus rapidement.
Ainsi, la valeur du potentiomètre détermine la vitesse du moteur pas à pas.
VIDÉO DE SIMULATION:
Ici, vous pouvez voir clairement comment la vitesse du moteur varie avec la résistance R2. Sa valeur est d'abord diminuée puis augmentée, ce qui à son tour augmente d'abord puis diminue la vitesse du moteur pas à pas.
Une paire de: Comment fonctionnent les lampes de poche à manivelle Un article: Circuit de tachymètre Arduino pour des lectures précises