Lorsque nous entendons le mot système d'exploitation, nous pensons d'abord au système d'exploitation utilisé dans les ordinateurs portables et les ordinateurs. Généralement, nous utilisons différents types de systèmes d'exploitation comme Windows XP, Linux, Ubuntu, Windows 7, 8.8.1 et 10. Dans les smartphones, les systèmes d'exploitation sont comme KitKat, Jellybean, marshmallow et Nougat. Dans un appareil électronique numérique, il existe une sorte de système d'exploitation développé par le programme microcontrôleur . Il y a différents types de systèmes d'exploitation à développer pour le microcontrôleur, mais ici, nous avons discuté du système d'exploitation en temps réel.
Qu'est-ce qu'un système d'exploitation en temps réel?
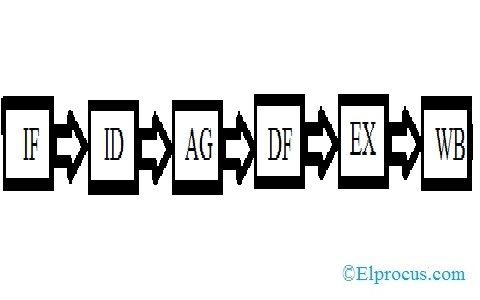
Le RTOS est un système d'exploitation, c'est un cerveau du système temps réel et sa réponse aux entrées immédiatement. Dans le RTOS, la tâche sera achevée à l'heure spécifiée et ses réponses d'une manière prévisible à des événements imprévisibles. La structure du RTOS est illustrée ci-dessous.

Structure de RTOS
Types de RTOS
Il existe trois types différents de RTOS qui suivent
- Système d'exploitation doux en temps réel
- Système d'exploitation dur en temps réel
- Système d'exploitation en temps réel ferme

Types de RTOS
Système d'exploitation doux en temps réel
Le système d'exploitation soft en temps réel a certaines échéances, peut être manqué et il entreprendra l'action à un instant t = 0 +. Le système d'exploitation temps réel doux est un type de système d'exploitation et il ne contient pas de règles extrêmes. Le moment critique de ce système d'exploitation est retardé dans une certaine mesure. Les exemples de ce système d'exploitation sont l'appareil photo numérique, les téléphones portables et les données en ligne, etc.

Système d'exploitation doux en temps réel
Système d'exploitation dur en temps réel
C'est aussi un type de système d'exploitation et il est prédit par une date limite. Les délais prévus réagiront à un instant t = 0. Quelques exemples de ce système d'exploitation sont le contrôle du coussin gonflable dans les voitures, le frein antiblocage et le système de contrôle du moteur, etc.
Système d'exploitation en temps réel ferme
Dans l'entreprise en temps réel, un système d'exploitation a certaines contraintes de temps, elles ne sont pas strictes et cela peut provoquer des effets indésirables.Des exemples de ce système d'exploitation sont une inspection visuelle en automatisation industrielle.
Travailler avec le système d'exploitation en temps réel
Il existe différents types de fonctionnalités de base d'un RTOS qui suivent
- Planificateur basé sur la priorité
- Routine d'interruption de l'horloge système
- Comportement déterministe
- Synchronisation et messagerie
- Service RTOS
Planificateur basé sur la priorité
Dans le planificateur basé sur les priorités, la plupart des RTOS sont entre 32 et 256 priorités possibles pour les tâches ou processus individuels. Ce planificateur exécutera le processus avec la priorité la plus élevée. Si la tâche s'exécute sur la CPU, la tâche suivante de priorité la plus élevée s'exécute et continue les processus.
Dans le système, le processus ayant la priorité la plus élevée aura la CPU
- Il court pour fermer
- Si la tâche d'origine est anticipée par la nouvelle, un processus hautement prioritaire est préparé.
Il y a trois états des tâches ou processus qui sont comme prêts à être exécutés et l'autre est bloqué et la description de chaque état est donnée ci-dessous.
Prêt à courir
On dit que le processus est prêt à fonctionner lorsque le processus dispose de toutes les ressources pour s'exécuter, mais qu'il ne doit pas être en cours d'exécution. Ensuite, il est appelé comme prêt à fonctionner.
Fonctionnement
Si la tâche est en cours d'exécution, on dit qu'elle a un état en cours d'exécution.
Bloqué
Dans cet état, s'il ne dispose pas des ressources suffisantes pour s'exécuter, il est envoyé à l'état bloqué.
Trois techniques sont modifiées pour planifier la tâche, les suivantes avec leur description.
Programmation coopérative
Dans ce type de planification, la tâche s'exécutera jusqu'à ce que l'exécution soit terminée
Planification à la ronde
Dans cette planification, chaque processus se voit attribuer un créneau horaire fixe et le processus doit terminer son exécution ou bien la tâche perd son flux et sa génération de données.
Planification préventive
L'ordonnancement préemptif implique l'attribution de temps prioritaire en fonction du temps. En général, 256 niveaux de priorité sont utilisés et chaque tâche a un niveau de priorité unique. Certains systèmes prennent en charge le niveau de priorité le plus élevé et les tâches multiples ont certaines priorités.
Routine d'interruption de l'horloge système
Pour effectuer l'opération sensible au temps, le RTOS fournira une sorte d'horloges système. S'il y a une horloge système de 1 ms, vous devez terminer la tâche en 50 ms. Habituellement, il existe une API qui vous suit pour dire «Dans 50 ms, réveillez-moi». Par conséquent, la tâche serait en position de sommeil jusqu'à ce que le RTOS se réveille. Nous avons deux avis indiquant que le réveillé ne garantira pas de fonctionner exactement à ce moment-là, cela dépend de la priorité et si la priorité la plus élevée fonctionne actuellement, elle serait retardée.
Comportement déterministe
Le RTOS se déplace très longuement pour protéger que, que vous ayez pris 100 tâches ou 10 tâches, cela ne fait aucune différence dans la distance pour changer de contexte et il détermine la tâche la plus prioritaire suivante. Dans la zone principale déterministe, le RTOS est la gestion des interruptions, lorsque la ligne d'interruption leur est signalée, le RTOS prend immédiatement l'action du sous-programme de service d'interruption correct et l'interruption est traitée sans aucun retard.
Nous devons faire du bruit que les développeurs du projet écriront les ISR spécifiques au matériel. Avant maintenant, le RTOS donne les ISR pour les ports série, les horloges système et il peut s'agir d'un matériel réseau, mais s'il y a quelque chose de spécialisé comme les signaux de stimulateur cardiaque, les actionneurs, etc., ne font pas partie du RTOS.
Tout cela concerne les généralisations grossières et il existe une grande variété d'implémentation dans le RTOS. Certains des RTOS fonctionnent différemment et la description ci-dessus est compatible avec la grande partie des RTOS existants.
Synchronisation et messagerie
La synchronisation et la messagerie assurent la communication entre la tâche d'un système à un autre système et les services de messagerie sont les suivants. Pour synchroniser les activités internes, l'indicateur d'événement est utilisé et pour envoyer les messages texte que nous pouvons utiliser dans la boîte aux lettres, les tuyaux et les files d'attente de messages. Dans les zones de données communes, les sémaphores sont utilisés.
- Sémaphores
- Drapeaux d'événements
- Boîtes aux lettres
- Tuyaux
- Files d'attente de messages
Service RTOS
La partie la plus importante du système d'exploitation est le noyau. Pour surveiller le matériel, la tâche doit être relevée et les responsabilités du noyau gèrent et allouent les ressources. Si la tâche ne parvient pas à attirer l’attention du processeur à chaque fois, il existe d’autres services fournis par le noyau. Les suivants sont
- Services de temps
- Services de gestion des interruptions
- Services de gestion des appareils
- Services de gestion de la mémoire
- Services d'entrées-sorties
Avantages de RTOS
- Lorsque toutes les ressources et tous les périphériques sont inactifs, le RTOS donne une consommation maximale du système et plus de sortie.
- Lorsqu'une tâche est en cours d'exécution, il n'y a aucune chance d'obtenir l'erreur car le RTOS est sans erreur.
- L'allocation de mémoire est le meilleur type à gérer dans ce type de système.
- Dans ce type de système, le temps de passage est très inférieur.
- En raison de la petite taille du programme, le RTOS est utilisé dans le système embarqué comme les transports et autres.
Dans cet article, nous avons discuté du fonctionnement du système d'exploitation en temps réel. J'espère qu'en lisant ceci, vous avez obtenu des informations de base. Si vous avez des questions concernant cet article ou pour mettre en œuvre des projets électriques , n'hésitez pas à commenter dans la section ci-dessous. Voici la question pour vous, quelles sont les fonctions du RTOS?