Un circuit qui permet à un moteur connecté de fonctionner dans le sens des aiguilles d'une montre et dans le sens inverse des aiguilles d'une montre via des déclencheurs d'entrée alternatifs est appelé un circuit de commande bidirectionnel.
La première conception ci-dessous traite d'un circuit de contrôleur de moteur bidirectionnel basé sur un pont complet ou un pont en H utilisant les 4 amplificateurs opérationnels de l'IC LM324. Dans le deuxième article, nous apprenons un circuit de contrôleur de moteur bidirectionnel à couple élevé utilisant IC 556
introduction
En général, interrupteurs mécaniques sont habitués à régler le sens de rotation d'un moteur à courant continu. Réglage de la polarité de la tension utilisée et le moteur tourne dans le sens opposé!
D'une part, cela peut présenter l'inconvénient qu'un commutateur DPDT nécessite d'être ajouté pour modifier la polarité de la tension, mais nous n'avons affaire qu'à un commutateur qui rend la procédure assez facile.
Cependant, le DPDT peut avoir un problème sérieux, il n'est pas recommandé d'inverser brusquement la tension sur un moteur à courant continu pendant son mouvement de rotation. Cela peut entraîner une pointe de courant, qui pourrait éventuellement brûler le régulateur de vitesse associé.
En outre, tout type de contrainte mécanique peut également entraîner des problèmes similaires. Ce circuit bat facilement ces complications. La direction et la vitesse sont manipulées à l'aide d'un potentiomètre solitaire. La rotation du pot dans une direction spécifiée provoque le démarrage du moteur.
La commutation du pot dans la direction opposée permet au moteur de tourner en sens inverse. La position médiane du potentiomètre coupe le moteur, assurant que le moteur ralentit d'abord puis s'arrête avant qu'un effort ne soit fait pour changer la direction.
Spécifications techniques
Tension: Le circuit et le moteur utilisent l'alimentation électrique commune. Cela implique que, parce que la tension de fonctionnement la plus élevée du LM324 est de 32VDC, cela devient également la tension maximale accessible pour faire fonctionner le moteur.
Actuel: Le MOSFET IRFZ44 est conçu pour 49A, l'IRF4905 sera capable de gérer 74A. Néanmoins, les pistes de PCB qui vont des broches MOSFET au bornier à vis ne peuvent gérer que 5A environ. Cela pourrait être amélioré en soudant des morceaux de fil de cuivre sur les pistes du PCB.
Dans ce cas, assurez-vous que les MOSFET ne deviennent pas trop chauds - s'ils le font, des dissipateurs thermiques plus grands devront être montés sur ces appareils.
Brochage LM324

CONTRÔLE BIDIRECTIONNEL DES MOTEURS CC À L'AIDE DU LM324
Fondamentalement, vous trouverez 3 façons de ajuster la vitesse des moteurs à courant continu :
1. En utilisant des engrenages mécanisés pour atteindre l'accélération idéale: Cette approche va souvent au-delà de la commodité de la majorité des passionnés pratiquant dans des ateliers à domicile.
deux. Diminution de la tension du moteur via une résistance série. Cela peut certainement être inefficace (la puissance sera dissipée dans la résistance) et entraîner également une réduction du couple.
Le courant consommé par le moteur augmente également à mesure que la charge sur le moteur augmente. Un courant accru signifie une chute de tension plus importante sur la résistance série et donc une chute de tension pour le moteur.
Le moteur fait alors un effort pour tirer une quantité de courant encore plus élevée, provoquant le calage du moteur.
3. En appliquant la totalité de la tension d'alimentation au moteur par impulsions courtes: Cette méthode supprime l'effet de chute de série. Ceci est appelé modulation de largeur d'impulsion (PWM) et est la stratégie trouvée dans ce circuit. Les impulsions rapides permettent au moteur de fonctionner lentement. Des impulsions prolongées permettent au moteur de fonctionner plus rapidement.

FONCTIONNEMENT (voir schéma)
Le circuit pourrait être divisé en quatre étapes:
1. Commande moteur - IC1: A
2. Générateur d'ondes triangulaires - IC1: B
3. Comparateurs de tension - IC1: C et D
4. Entraînement par moteur - Q3-6
Commençons par l'étape de commande de moteur, centrée sur les MOSFET Q3-6. Seuls quelques-uns de ces MOSFET restent dans l'état activé à tout instant. Pendant que Q3 et Q6 sont allumés, le courant traverse le moteur et le fait tourner dans un seul sens.
Dès que Q4 et Q5 sont en état de fonctionnement, la circulation du courant est inversée et le moteur commence à tourner dans le sens opposé. IC1: C et IC1: D traitent des MOSFET activés.
Les amplificateurs opérationnels IC1: C et IC1: D sont câblés en tant que comparateurs de tension. La tension de référence pour ces amplificateurs opérationnels est produite par le diviseur de tension de résistance de R6, R7 et R8.
Observez que la tension de référence pour IC1: D est reliée à l’entrée «+», mais pour IC1: C, elle est couplée à l’entrée «-».
Cela signifie que IC1: D est activé avec une tension supérieure à sa référence tandis que IC1: C est invité avec une tension inférieure à sa référence. Opamp IC1: B est configuré comme un générateur d'ondes triangulaires et fournit le signal d'activation aux comparateurs de tension concernés.
La fréquence est à peu près l'inverse de la constante de temps de R5 et C1 - 270Hz pour les valeurs employées.
Diminuer R5 ou C1 augmente la fréquence augmenter l'un ou l'autre va réduire la fréquence.Le niveau de sortie crête à crête de l'onde triangulaire est bien inférieur à la différence entre les deux références de tension.
Il est donc extrêmement difficile pour les deux comparateurs d'être activés en même temps. Ou bien les 4 MOSFET commenceraient à conduire, conduisant à un court-circuit et les ruinant tous.
La forme d'onde triangulaire est structurée autour d'une tension de décalage CC. L'augmentation ou la diminution de la tension de décalage fait varier la position d'impulsion de l'onde triangulaire de manière appropriée.
La commutation de l'onde triangulaire vers le haut permet au comparateur IC1: D de s'activer, la diminution entraîne l'activation du comparateur IC1: C. Lorsque le niveau de tension de l'onde triangulaire est au milieu des deux références de tension, aucun des comparateurs n'est induit.La tension de décalage CC est régulée par le potentiomètre P1 via IC1: A, qui est conçu comme un suiveur de tension.
Cela donne une source de tension à faible impédance de sortie, ce qui permet à la tension de décalage CC d'être moins vulnérable à l'impact de charge de IC1: B.
Lorsque le «potentiomètre» est commuté, la tension de décalage CC commence à varier, soit vers le haut, soit vers le bas en fonction de la direction dans laquelle le potentiomètre est retourné. La diode D3 présente une protection contre l'inversion de polarité pour le contrôleur.
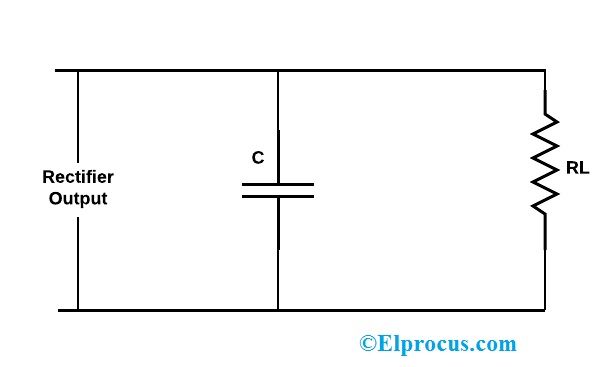
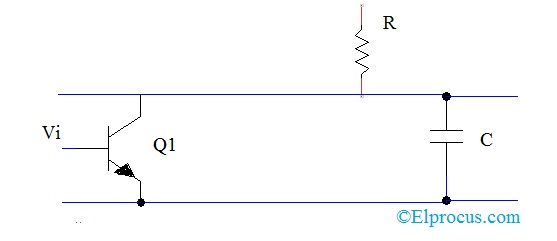
La résistance R15 et le condensateur C2 sont un simple filtre passe-bas. Ceci est destiné à nettoyer toutes les pointes de tension provoquées par les MOSFET lors de la mise sous tension du moteur.
Liste des pièces

2) Commande de moteur bidirectionnelle utilisant IC 556
Le contrôle de vitesse et bidirectionnel des moteurs à courant continu est relativement simple à mettre en œuvre. Pour les moteurs alimentés indépendamment, la vitesse est, en principe, une fonction linéaire de la tension d'alimentation. Les moteurs à aimant permanent sont une sous-catégorie de moteurs alimentés indépendamment, et ils sont souvent utilisés dans les jouets et les modèles.
Dans ce circuit, la tension d'alimentation du moteur est variée au moyen d'une modulation de largeur d'impulsion (PWM) qui garantit un bon rendement ainsi qu'un couple relativement élevé à bas régime du moteur. Une seule tension de commande comprise entre 0 et +10 V permet d'inverser la vitesse du moteur et de la faire varier de zéro au maximum dans les deux sens.
Le CI multivibrateur Astable est configuré comme un oscillateur à 80 Hz et détermine la fréquence du signal PWM. La source actuelle T1 facture Ca. La tension en dents de scie aux bornes de ce condensateur est comparée à la tension de commande en 1C2, qui délivre le signal PWM au tampon N1-Na ou NPN1. Le pilote de moteur basé sur Darlington est un circuit en pont capable de commander des charges jusqu'à 4 ampères, à condition que le courant de rodage reste inférieur à 5 ampères et qu'un refroidissement suffisant soit fourni pour les transistors de puissance T1 -Ts. Les diodes D1, D5 assurent une protection contre les surtensions inductives du moteur. L'interrupteur S1 permet d'inverser instantanément le sens du moteur.

Images prototypes



Une paire de: Comprendre les circuits d'amplification Suivant: Comment connecter des transistors (BJT) et MOSFET avec Arduino