
De nos jours, la robotique devient l'une des plus avancées dans le domaine de la technologie. Le applications de la robotique impliquent principalement dans les automobiles, le médical, la construction, la défense et également utilisé comme un robot anti-incendie pour aider les gens de l'accident d'incendie. Mais contrôler le robot avec une télécommande ou un interrupteur est assez compliqué. Ainsi, un nouveau projet est développé, à savoir un robot de contrôle gestuel basé sur un accéléromètre. L'objectif principal de ce projet est de contrôler le mouvement du robot avec un geste de la main à l'aide d'un accéléromètre.

Robot de contrôle gestuel basé sur un accéléromètre
Robot de contrôle gestuel basé sur un accéléromètre
Ce projet comprend une section émetteur et une section récepteur. Le composants requis pour construire ce projet sont Ht12e, Ht12d, L293D, AT89S52, 7805, condensateur, cristal, connecteur PBT, antenne unipolaire, résistance, LED, accéléromètre et batterie.L'accéléromètre est un appareil essentiel dans ce projet.
l'accéléromètre ou le dispositif émetteur dépend du geste de la main. Grâce au dispositif émetteur, une commande est reçue et elle est traitée à l'aide du microcontrôleur At89S51. Ce le microcontrôleur donne signal au robot de se déplacer dans la direction souhaitée. Le principe de fonctionnement de base de ce robot ensemble des signaux de données des lectures de l'appareil de transmission au microcontrôleur intégré dans le robot. Le microcontrôleur préprogrammé fonctionne selon le programme, ce qui fait fonctionner le robot en conséquence.
Un robot à commande gestuelle utilisant un accéléromètre est un type de robot qui peut être actionné par le mouvement de la main en plaçant un accéléromètre dessus. Ce projet est divisé en deux parties: dispositif émetteur et dispositif récepteur. Lorsqu'un appareil gestuel fonctionne comme un appareil émetteur et un robot fonctionne comme un appareil récepteur, lorsqu'un appareil émetteur (accéléromètre) est placé sur la main, il enverra des signaux au robot pour l'opération requise.
Les principaux composants utilisés dans la section de transmission comprennent un accéléromètre, un comparateur, un codeur HT12E IC et Émetteur RF .
Accéléromètre
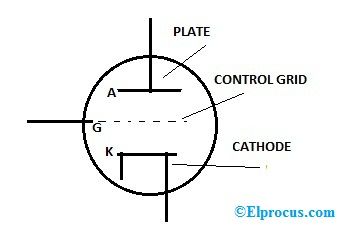
Un accéléromètre est un type de capteur et il donne une donnée analogique en se déplaçant dans la direction X, Y et Z. Ces directions dépendent du type de capteur. Le diagramme de l'accéléromètre est illustré ci-dessous. Ce capteur se compose de directions de flèche, si nous inclinons le capteur dans une direction, les données au niveau de la broche particulière changeront sous forme d'analogique. L'accéléromètre se compose de six broches, où la fonction de chaque broche est discuté ci-dessous.

Accéléromètre
- Pin-1: la broche VDD est utilisée pour fournir une alimentation + 5V à cette broche
- Pin-2: la broche GND est connectée à la terre à des fins de polarisation
- Pin-3: la broche X recevra les données dans la direction X
- Pin-4: la broche Y recevra les données dans la direction Y
- Pin-5: la broche Z recevra les données dans la direction Z
- Pin-6: la broche ST est utilisée pour régler la sensibilité de l'accéléromètre 1.5g ou 2g ou 3g ou 4g
Comparateur
Le comparateur est utilisé pour changer la tension analogique en tension numérique et compare cette tension analogique à une tension de référence et donne une basse tension ou une haute tension précise
Encodeur
Ce codeur est utilisé pour coder les données 4 bits et les transmet à l'aide d'un module émetteur RF.
Module émetteur RF
Le module RF TX fonctionne avec une fréquence de 433 MHz et ce module est facilement disponible sur le marché à faible coût
Les principaux composants utilisés dans la section de réception comprennent le récepteur, le décodeur, le microcontrôleur et le pilote de moteur.

Section émetteur
Récepteur RF
Le récepteur RF de ce projet recevra les données qui sont transférées par l'appareil émetteur.
Décodeur
Le décodeur est utilisé pour changer les données série en données parallèles qui sont reçues du module récepteur RF.
Microcontrôleur
Le le microcontrôleur est la partie la plus essentielle du robot. Un microcontrôleur de la famille 8051 est utilisé dans le circuit pour donner une capacité de décision
Pilote de moteur
Le pilote de moteur est un dispositif qui donne le mouvement pour effectuer une tâche comme un moteur. Nous avons donc besoin du pilote du moteur pour les faire passer par le contrôleur. L'interface entre le moteur et le microcontrôleur peut être réalisée à l'aide d'un circuit intégré de pilote de moteur L293D dans ce circuit.
Au niveau de la section récepteur, un module récepteur RF reçoit les données de l'émetteur. Les données reçues peuvent être décodées par un IC HT12D. Les données reçues peuvent être traitées par le microcontrôleur AT89S51 et le pilote de moteur est utilisé pour contrôler le moteur.

Section des récepteurs
Travail de robot de contrôle gestuel
Le robot à commande gestuelle basé sur un accéléromètre se déplace en fonction du mouvement de la main lorsque nous plaçons l'accéléromètre sur votre main. Lorsque nous inclinons la main avec un accéléromètre devant le robot, le robot commence à avancer jusqu'à ce que le mouvement suivant soit donné. Lorsque nous inclinons la main vers l'arrière, le robot change de direction et d'état. Ensuite, il commence à se déplacer vers l'arrière jusqu'à ce que le signal suivant soit donné. Lorsque nous inclinons la main sur le côté gauche, le robot se déplace vers le côté gauche jusqu'à ce que le signal suivant soit donné.De la même manière, lorsque nous inclinons la main sur le côté droit, le robot se déplace du côté droit.
Applications
Le applications de l'accéléromètre le robot contrôlé par gestes comprend
- Ces robots sont utilisés dans des applications militaires pour faire fonctionner des robots
- Ces robots sont utilisés dans des applications médicales à des fins de chirurgie
- Ces robotiques sont utilisées dans le domaine de la construction
- Ces robots sont utilisés dans les industries pour contrôler le chariot et le levage.
Il s'agit donc du robot de contrôle gestuel basé sur l'accéléromètre, de son fonctionnement et de ses applications.Nous espérons que vous avez une meilleure compréhension de ce concept. De plus, tout doute concernant ce concept ou projets électroniques , veuillez donner votre avis en commentant dans la section des commentaires ci-dessous. Voici une question pour vous, quelles sont les applications du robot de contrôle gestuel basé sur un accéléromètre?
Crédits photo:
- Robot de contrôle gestuel basé sur un accéléromètre ytimg
- Accéléromètre static.flickr





{kind=link}
{kind=link}