Les servomoteurs sont des dispositifs mécaniques autonomes qui permettent de contrôler les machines avec une grande précision. Ceux-ci se retrouvent dans de nombreuses applications, des jouets à l'automatisation industrielle. Il existe différents types de moteurs, mais les servomoteurs sont spécialement conçus pour une position angulaire spécifique afin de contrôler les machines. Habituellement, le servomoteur est utilisé pour contrôler le mouvement angulaire entre 0 ° à 180 ° et 0 ° à 90 °. Le principe de fonctionnement du servomoteur basé sur le PWM ( modulation de largeur d'impulsion ) impulsions.

Servomoteur
Interfaçage du servomoteur avec le microcontrôleur 8051
Un servomoteur est l'un des moteurs les plus couramment utilisés pour un mouvement angulaire précis. L'avantage d'utiliser un servomoteur est que la position angulaire du moteur peut être contrôlée sans aucun mécanisme de rétroaction. Les servomoteurs sont généralement utilisés dans applications commerciales et industrielles . Ils sont également largement utilisés comme dans les systèmes d'entraînement tels que les robots, les avions, etc.

Interfaçage du servomoteur avec le microcontrôleur 8051
Le principe de fonctionnement et le fonctionnement du servomoteur Hobby sont très simples, il se composait de trois fils dont deux (noir et rouge) étaient utilisés pour fournir l'alimentation et le troisième fil pour fournir un signal de commande. Les ondes modulées en largeur d'impulsion (PWM) sont utilisées comme signaux de commande et la position angulaire est définie par la largeur de l'impulsion à l'entrée de commande. Dans cet article, nous utilisons un servomoteur ayant un angle de rotation de 0 à 180 ° et la position angulaire peut être contrôlée en faisant varier les cycles de service entre 1 ms et 2 ms.
Ici le servomoteur s'interfaçant avec Microcontrôleur 8051 , le fil noir connecté à la broche de terre et le moteur sont alimentés par le fil rouge. Le contrôle du servomoteur connecté port0 du microcontrôleur 8051. L'oscillateur à cristal de 11,0592 MHz est utilisé pour fournir l'horloge pulsée au microcontrôleur et les condensateurs en céramique de 22pf utilisés pour stabiliser le fonctionnement du cristal. Un condensateur 10KΩ et 10uf est utilisé pour fournir la remise sous tension du microcontrôleur.
Contrôle d'un servomoteur avec des rotations angulaires
Le principe de fonctionnement du servomoteur dépend principalement des cycles de service. Il utilise des ondes PWM (Pulse Width Modulated) comme signaux de commande. L'angle de rotation est déterminé par la largeur d'impulsion de la broche de commande. Voici le servomoteur utilisé pour l'angle de rotation de 0 à 180 degrés. Nous pouvons contrôler la position angulaire précise en faisant varier l'impulsion entre 1 ms et 2 ms.

Contrôle d'un servomoteur avec des rotations angulaires
Programmation de servomoteurs avec rotations angulaires
#comprendre
Sbit servomoteur_pin = P0 ^ 5
Délai d'annulation (entier non signé)
Void servo_delay (unsigned int)
Void principal ()
{
Servomoteur_pin = 0x00
Fais
{
// tourner à 0 °
Servomoteur_pin = 0x01
Sevo_delay (50)
Servomoteur_pin = 0x00
Retard (1000)
// tourner à 90 degrés
Servomoteur_pin = 0x01
Sevo_delay (82)
Servomoteur_pin = 0x00
Retard (1000)
// tourner à 180 degrés
Servomoteur_pin = 0x01
Sevo_delay (110)
Servomoteur_pin = 0x00
Retard (1000)
Alors que (1)
}
}
Délai d'annulation (non signé int a)
{
Int p non signé
Pour (p = 0p
}
Void servo_delay (unsigned int a)
{
Int p non signé
Pour (p = 0p
}
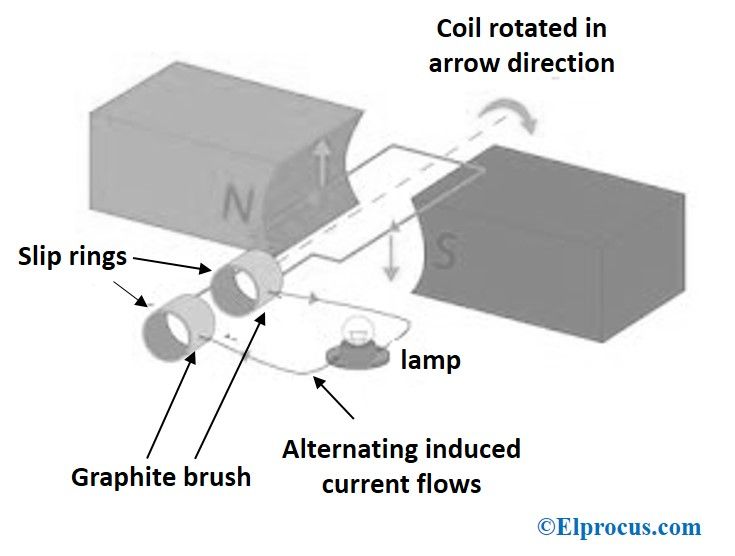
Principe de fonctionnement du servomoteur
Le principe de fonctionnement du servomoteur dépend principalement de la «règle flamande de la main gauche». Fondamentalement, les servomoteurs sont adaptés avec Moteurs à courant continu , un capteur de position, un réducteur de vitesse et un circuit électronique. Les moteurs à courant continu sont alimentés par une batterie et fonctionnent à haute vitesse et à faible couple. Nous avons assemblé l'arbre et l'engrenage connectés aux moteurs à courant continu, puis nous pouvons augmenter et diminuer la vitesse du moteur progressivement.
Le capteur de position détecte l'emplacement de l'arbre à partir de sa position fixe et envoie les informations au circuit de commande. Le circuit de commande décode les signaux en conséquence du capteur de position et compare l'emplacement réel des moteurs avec la position préférée et commande en conséquence le sens de rotation du moteur à courant continu pour obtenir la position nécessaire. Généralement, le servomoteur nécessite une alimentation de 4,8 V à 6 V CC.
Commande du servomoteur par un port série
L'intention principale de ce projet est de contrôler le servomoteur à l'aide d'un ordinateur personnel. Il a besoin d'une seule ligne de contrôle du microcontrôleur et de la ligne d'entrée série, du port série de l'ordinateur personnel pour envoyer des commandes au circuit. La source de synchronisation est fournie par l'oscillateur à cristal. Circuit de servomoteur conçu interfacé avec l'ordinateur à l'aide du câble série et du sélecteur de niveau, puis ouvrez le logiciel «Hyper Terminal» dans le PC pour sélectionner le comportement de l'ordinateur.

Commande de servomoteur via des commandes de port série
Une fois que les commandes sont envoyées de l'ordinateur personnel (PC) au microcontrôleur via l'hyper terminal avec un décaleur de niveau, le microcontrôleur obtient ces données et les compare avec les données prédéfinies et génère des signaux correspondants pour activer le pilote de moteur pour le piloter au niveau du vitesse souhaitée. De nombreux projets de microcontrôleur développé sur la base de servomoteurs tels que des robots d'équilibrage, des hélicoptères de piste, etc. Nous pouvons utiliser un servomoteur à des fins de sécurité en s'interfaçant avec une caméra sans fil, car nous pouvons contrôler la caméra 360 digress.
Robot auto-équilibrant
Le robot auto-équilibrant est capable de s'équilibrer à l'aide des servomoteurs. Ce robot s'est assemblé en utilisant des composants structurels, mécaniques et électroniques qui produisent une plate-forme visiblement déséquilibrée qui est fortement disposée à basculer dans un alignement. Les roues du robot sont capables de rotation indépendante de deux manières, entraînées par un servomoteur. Les informations sur l'angle de l'appareil par rapport au sol seront obtenues à partir de capteurs d'inclinaison sur l'appareil.

Robot auto-équilibrant
Le capteur d'inclinaison peut être un accéléromètre, un capteur gyroscopique ou Capteur IR (pour mesurer la distance au sol). Les capteurs envoient des informations à l'unité de commande, qui traitera la rétroaction à l'aide d'un algorithme de base proportionnel, intégral, dérivé (PID) pour générer des signaux de commande de position de compensation aux servomoteurs afin d'équilibrer l'appareil.
Applications de servomoteur
- Il est utilisé dans les machines de presse pour couper les pièces à la taille
- Il est utilisé dans la station de remplissage de sucre
- Il est utilisé dans les applications d'étiquetage
- Il est utilisé système d'emballage avec fonction de synchronisation aléatoire
- Il est utilisé utilisé dans les avions
Avantages du servomoteur
- Si un moteur subit une charge lourde, le pilote augmentera le courant vers la bobine du moteur au fur et à mesure de ses efforts pour faire tourner le moteur. Principalement, il n'y a pas de condition de décalage.
- Un fonctionnement à grande vitesse est possible grâce aux servomoteurs.
Tout est question de principe de fonctionnement du servomoteur et interface avec le microcontrôleur 8051 .En outre, pour toute aide technique concernant cet article ou projets électroniques qui sont conçus en utilisant des dispositifs d'interfaçage tels que RTC, OLED, mémoire flash, LCD personnalisé, écrans tactiles, etc. Vous pouvez nous contacter en donnant vos commentaires dans la section commentaires ci-dessous.