Le message traite d'un circuit d'entraînement à fréquence variable monophasé ou d'un circuit VFD pour contrôler la vitesse du moteur à courant alternatif sans affecter leurs spécifications opérationnelles.
Qu'est-ce qu'un VFD
Les moteurs et autres charges inductives similaires n'aiment pas spécifiquement fonctionner avec des fréquences qui pourraient ne pas être dans leurs spécifications de fabrication, et ont tendance à devenir très inefficaces s'ils sont forcés de le faire dans de telles conditions anormales.
Par exemple, un moteur spécifié pour fonctionner à 60 Hz peut ne pas être recommandé pour fonctionner avec des fréquences de 50 Hz ou d'autres plages.
Cela peut produire des résultats indésirables tels qu'un échauffement du moteur, inférieur ou supérieur aux vitesses requises et une consommation anormalement élevée, ce qui rend les choses très inefficaces et réduit la dégradation de la durée de vie de l'appareil connecté.
Cependant, le fonctionnement des moteurs dans des conditions de fréquence d'entrée différentes devient souvent une contrainte et dans de telles situations, un VFD ou un circuit de commande à fréquence variable peut devenir très pratique.
Un VFD est un dispositif qui permet à l'utilisateur de contrôler la vitesse d'un moteur à courant alternatif en ajustant la fréquence et la tension de l'alimentation d'entrée selon les spécifications du moteur.
Cela signifie également qu'un VFD nous permet de faire fonctionner n'importe quel moteur à courant alternatif via toute alimentation secteur disponible, quelles que soient ses spécifications de tension et de fréquence, en personnalisant de manière appropriée la fréquence et la tension du VFD conformément aux spécifications du moteur.
Cela se fait normalement en utilisant la commande donnée sous la forme d'un bouton variable mis à l'échelle avec un étalonnage de fréquence différent.
Faire un VFD à la maison peut sembler une proposition difficile, mais un coup d'œil à la conception suggérée ci-dessous montre qu'après tout, il n'est pas si difficile de construire cet appareil très utile (conçu par moi).
Fonctionnement du circuit
Le circuit peut être fondamentalement divisé en deux étapes: l'étage pilote demi-brige et l'étage générateur logique PWM.
L'étage de commande de demi-pont utilise l'IC IR2110 de commande de demi-pont qui s'occupe à lui seul de l'étage de commande de moteur haute tension incorporant respectivement deux mosfets côté haut et côté bas.
Le circuit intégré de pilotage constitue ainsi le cœur du circuit mais ne nécessite que quelques composants pour mettre en œuvre cette fonction cruciale.
Le CI ci-dessus aurait cependant besoin d'une logique élevée et d'une logique basse en fréquences pour entraîner la charge connectée à la fréquence spécifique souhaitée.
Ces signaux logiques d'entrée hi et lo deviennent les données de fonctionnement du circuit intégré de commande et doivent inclure des signaux pour déterminer la fréquence spécifiée ainsi que des PWM en phase avec le secteur CA.
Les informations ci-dessus sont créées par une autre étape comprenant quelques 555 circuits intégrés et un compteur de décennie. IC 4017.
Les deux 555 CI sont responsables de la génération des PWM à onde sinusoïdale modifiée correspondant à l'échantillon AC pleine onde dérivé d'une sortie de redresseur à pont abaissé.
L'IC4017 fonctionne comme un générateur logique de sortie de totem dont le taux de fréquence alternative devient le paramètre de détermination de la fréquence PRINCIPALE du circuit.
Cette fréquence de détermination est prélevée sur la broche n ° 3 de IC1 qui alimente également la broche de déclenchement IC2 et pour créer les PWM modifiés à la broche n ° 3 de IC2.
Les PWM à onde sinusoïdale modifiée sont balayées aux sorties du circuit intégré 4017 avant d'alimenter l'IR2110 afin de superposer une `` impression '' exacte des PWM modifiées à la sortie du pilote de demi-pont et finalement pour le moteur qui est en fonctionnement.
Cx et les valeurs de pot 180k doivent être correctement sélectionnées ou ajustées afin de fournir la fréquence spécifiée correcte pour le moteur.
La haute tension au drain du mosfet côté haut doit également être calculée de manière appropriée et dérivée en redressant la tension secteur disponible AC après l'avoir convenablement augmentée ou diminuée conformément aux spécifications du moteur.
Les paramètres ci-dessus détermineront les volts corrects par Hertz (V / Hz) pour le moteur particulier.
La tension d'alimentation des deux étages peut être transformée en une ligne commune, idem pour la mise à la terre.
TR1 est un transformateur abaissé 0-12 V / 100 mA qui fournit aux circuits les tensions d'alimentation de fonctionnement requises.
Le circuit du contrôleur PWM

Vous devrez intégrer les sorties de l'IC 4017 du schéma ci-dessus aux entrées HIN et LIN du schéma suivant, de manière appropriée. Connectez également les diodes 1N4148 indiquées dans le schéma ci-dessus avec les portes MOSFET côté bas comme indiqué dans le schéma ci-dessous.
Le pilote de moteur de pont complet

Mettre à jour:

La conception simple de VFD simple discutée ci-dessus peut être encore simplifiée et améliorée en utilisant un IC IRS2453 à pont complet auto-oscillatoire, comme indiqué ci-dessous:
Ici, l'IC 4017 est complètement éliminé car le pilote de pont complet est équipé de son propre étage d'oscillateur, et par conséquent, aucun déclenchement externe n'est requis pour cet IC.
Étant une conception à pont complet, la commande de sortie vers le moteur a une plage complète de réglage de la vitesse de zéro à la vitesse maximale.
Le pot à la broche n ° 5 de IC 2 peut être utilisé pour contrôler la vitesse et le couple du moteur via la méthode PWM.
Pour le contrôle de vitesse V / Hz, le Rt / Ct associé à l'IRS2453 et au R1 associé à IC1 peuvent être respectivement modifiés (manuellement) pour obtenir des résultats appropriés.
Simplifier encore plus

Si vous trouvez la section de pont complète écrasante, vous pouvez la remplacer par un circuit de pont complet basé sur P, N-MOSFET, comme indiqué ci-dessous. Ce pilote de fréquence variable utilise le même concept à l'exception de la section de pilote à pont complet qui utilise des MOSFET à canal P du côté haut et des MOSFET à canal N du côté bas.
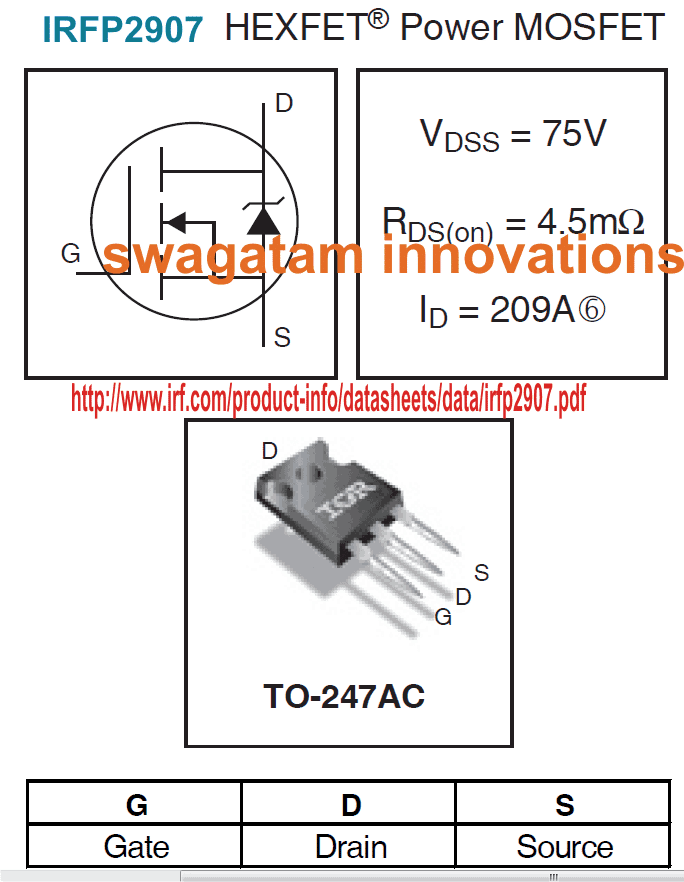
Bien que la configuration puisse sembler inefficace en raison de l'implication des MOSFET à canal P (en raison de leur cote RDSon élevée), l'utilisation de nombreux P-MOSFET parallèles peut sembler une approche efficace pour résoudre le problème de faible RDSon.
Ici, 3 MOSFET sont utilisés en parallèle pour les dispositifs à canal P pour assurer un chauffage minimisé des dispositifs, à égalité avec les homologues à canal N.
Précédent: Comment protéger les MOSFET - Principes de base expliqués Un article: Circuit de suivi I / V pour les applications solaires MPPT