
En informatique, l'interface CAN peut être une frontière partagée entre les deux parties distinctes d'une information de conversation système. La conversation peut se faire entre du matériel informatique, des logiciels, des humains, des périphériques et des combinaisons de ceux-ci. Certains périphériques matériels d'un ordinateur comme un écran tactile car un écran tactile peut partager et recevoir des informations via l'interface, alors que d'autres appareils comme un microphone, la souris ne sont qu'un moyen. Les interfaces sont principalement de deux types tels que l'interfaçage matériel et l'interfaçage logiciel. Les interfaces matérielles sont utilisées dans de nombreux périphériques tels que les périphériques d'entrée, de sortie, les bus et les périphériques de stockage. Cette interface CAN peut être définie par les signaux logiques. Une interface logicielle peut être disponible dans une large gamme à différents niveaux. Un système d'exploitation peut s'interfacer avec différentes parties du matériel. Les programmes ou applications sur le Le système d'exploitation peut avoir besoin de communiquer à travers les flux et dans la programmation orientée objet, les objets de toute application doivent communiquer via des méthodes.

BUS CAN
Le bus CAN a été développé en 1983 chez Robert Bosch GmbH. Ce protocole a été publié en 1986 au Congrès de la SAE (Society of Automobile Engineers) à Detroit, Michigan. La première Protocole CAN a été produit par Philips et Intel et mis sur le marché en 1987. Mais la BMW série 8 a été le premier véhicule à disposer d'un système de câblage multiplex basé sur le protocole CAN.

BUS CAN
La forme complète du CAN est un réseau de zone de contrôleur . C'est un type d'autobus de véhicule principalement conçu pour permettre divers appareils et microcontrôleurs pour interagir les uns avec les autres sans ordinateur hôte. Ce protocole est basé sur un message et principalement conçu pour le câblage électrique des automobiles. Bosch a publié diverses versions du CAN et en 1991, le dernier CAN 2.0 a été publié.
CAN se compose de deux parties principalement telles que la partie A et la partie B où la partie A est un identifiant de 11 bits et est au format standard. La partie B est un identifiant 29 bits, et il est au format étendu. Un CAN qui utilise des identifiants 11 bits s'appelle AN 2.0A et un CAN qui utilise des identifiants 29 bits s'appelle CAN 2.0B
Interfaçage de CAN à USB
L'interfaçage du CAN à l'USB est un appareil simple, utilisé pour surveiller le bus CAN. Cet appareil utilise le microprocesseur NUC140LC1CN 32 K Cortexes-M0. Il possède à la fois des périphériques CAN et USB.
Les principales caractéristiques de l'interfaçage CAN vers USB sont
- C'est très simple à concevoir
- Bien assorti avec le protocole LAWICEL CANUSB
- S'exposer comme un appareil comme FTDI USB
- Il prend en charge les trames CAN 2.0B 29 bits et CAN 2.0A 11 bits
- Il se compose d'un tampon de messages interne (FIFO CAN)
- Il alimente à partir du port USB
- Pour les mises à jour du micrologiciel, un périphérique de stockage de masse (USB résidant sur Flash) est utilisé
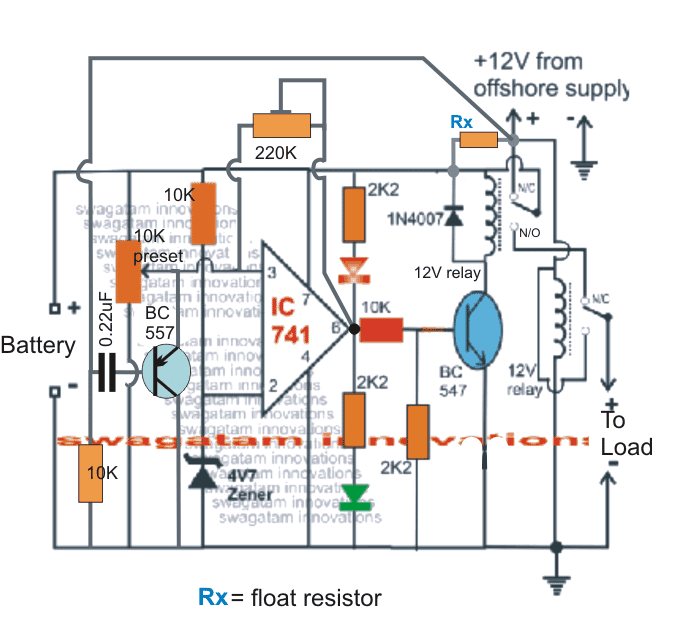
Diagramme schématique
La configuration du circuit de l'interface de CAN à USB est indiquée ci-dessous. Un transformateur CAN est utilisé pour permettre à l'appareil NUC140 CAN d'interagir avec le bus CAN. La puce TJA1051T résout l'objectif de NXP. Le microprocesseur NUC140 est capable de fonctionner avec une alimentation 5V, il n'y a pas besoin d'un régulateur de tension supplémentaire de 3,3V. Cette disposition pratique facilite la mise en œuvre de l'interface CAN vers USB.

Diagramme schématique
Le circuit est construit avec trois LED d'état à savoir D1, D2 et D3.
- Ici, l'état de la diode D1 indique que USB connecté à l'hôte
- Ici, l'état de la diode D2 indique que l'activité du bus CAN
- Les erreurs du bus CAN peuvent être signalées par la diode D3
Le microprocesseur NUC140 n’a pas de chargeur de démarrage intégré et la meilleure façon de programmer est d’utiliser uniquement le programmeur Nuvoton ICP et BRAS Interface SWD (Serial Wire Debug). Si le chargeur de démarrage est précédemment vidé avec un programme, il peut être déclenché. La connexion du JP1 avant la mise sous tension de l'interface déclenchera le chargeur de démarrage.
Chargeur de démarrage
La mémoire flash du microprocesseur NUC140LC1 est séparée en deux sections. Ils exécutent le code du programme utilisateur et le chargeur de démarrage. La taille du chargeur de démarrage et du programme utilisateur en cours d'exécution est de 4K et 32K. Ici, le chargeur de démarrage de périphérique de stockage de masse (MSD) de Nuvoton est utilisé pour créer un chargeur de démarrage USB entièrement fonctionnel. Le chargeur de démarrage s'activera en connectant un cavalier JP1. Donc, enfin, un lecteur amovible doit être visible dans le système de fichiers hôte avec une taille de 32 Ko. Copiez et collez simplement la mise à jour du micrologiciel CAN vers USB sur le lecteur du chargeur de démarrage. Déconnectez le câble USB, déconnectez le cavalier et rebranchez-le. La mise à jour du nouveau firmware devrait maintenant être en cours d'exécution.

Chargeur de démarrage
Programmation d'interface CAN vers USB et NuTiny-SDK-140
Programmation du microprocesseur NUC140 nécessite l’application de programmation Nuvoton ICP et le programmeur Nu-Link de Nuvoton. Mais ici, le NuTiny-SDK-140 (carte de démonstration NUC140) est disponible auprès de Digi-Key. Il se compose de deux parties telles que les programmeurs Nu-Link et la partie avec la puce NUC140. Cette planche est même perforée pour séparer la partie du Nu-Link. En fait, vous pouvez concevoir cet appareil exclusivement autour de la carte de démonstration NUC140, la seule puce d'émetteur-récepteur CAN supplémentaire sera essentielle.

Carte NUC140
Ainsi, il s'agit de l'interface CAN avec USB comprend, bus CAN, interface CAN vers USB, diagramme schématique, chargeur de démarrage et microprocesseur NUC140. Nous espérons que vous avez une meilleure compréhension de ce concept. De plus, pour toute question concernant cet article, veuillez donner vos précieuses suggestions en commentant dans la section des commentaires ci-dessous. Voici une question pour vous, quelles sont les applications de l'interface CAN?
Crédits photo:
- Interface CAN vers USB saelig
- BUS CAN canbuskit
- NUC140 instructables








{kind=link}
{kind=link}
{kind=link}