

Robot d'espionnage War Field avec caméra de vision nocturne
Le robot d'espionnage comme son nom l'indique est celui utilisé pour espionner les territoires ennemis. Ses applications peuvent être:
- Au moment de la guerre, où il peut être utilisé pour collecter des informations sur le terrain ennemi et surveiller ces informations dans une zone très sécurisée, et concevoir en toute sécurité un plan de contre-attaque.
- Surveiller les emplacements des organisations terroristes, puis planifier une attaque au moment opportun.
- Faire de la surveillance de toute zone sinistrée où les êtres humains ne peuvent pas aller.
Une brève idée sur le robot d'espionnage War Field
Alors laissez-nous une brève idée de la façon dont nous pouvons utiliser un robot dans les champs de guerre à des fins d'espionnage. Tout ce qui est nécessaire est une caméra sans fil montée sur le circuit du robot qui capture des images et des vidéos des territoires ennemis et transmet ces images, qui sont reçues par l'unité de réception du téléviseur.
Nous pouvons concevoir un simple prototype de guerre robot d'espionnage de terrain qui peuvent être contrôlés à distance et les images transmises par la caméra peuvent être surveillées et analysées sur un téléviseur.
Implémentation matérielle du robot d'espionnage War Field
Tout ce dont nous avons besoin, ce sont les composants suivants pour concevoir un robot d'espionnage de champ de guerre en dehors d'une base avec des roues et des moteurs.
- Unité de capteur - Une caméra de vision nocturne sans fil: En plus de ce qu'est une caméra de base, elle se compose d'un émetteur. Il capture des images et les transmet via l'émetteur sous la forme de signaux numériques, qui sont reçus par l'unité de réception connectée au téléviseur ou à l'ordinateur. La caméra peut être aussi loin que 30 miles du récepteur. UNE caméra de vision nocturne peut recevoir un éclairage soit en amplifiant la lumière visible à l'aide d'intensificateurs d'image, soit en utilisant la lumière infrarouge directement par des objets - imagerie thermique ou lumière infrarouge réfléchie par un éclairage infrarouge proche des objets.
- Une unité de réception: Le robot se compose également d'une unité de réception qui reçoit les signaux de commande pour contrôler les moteurs et donc l'unité de robot.
- Actionneurs: Il se compose de deux moteurs à courant continu en tant qu'actionneurs qui fournissent un mouvement de marche arrière et avant au robot.
- Unité de contrôle: Il se compose d'une unité émettrice à distance composée d'un microcontrôleur, d'un encodeur et d'un module RF et d'une unité de réception intégrée sur le circuit composé d'un module récepteur RF, d'un microcontrôleur et d'un décodeur.
Comment fonctionne une caméra de vision nocturne de robot d'espionnage War Field?
La caméra de vision nocturne sans fil intégrée au robot se compose d'un émetteur sans fil. Un groupe de LED IR est placé qui sont utilisés pour fournir une lumière IR aux sources d'image. La raison pour laquelle la lumière infrarouge est préférée est que la nuit, il fait généralement sombre et comme toute caméra a besoin de lumière pour l'éclairage, la lumière infrarouge est l'option la plus préférée car tous les objets émettent une gamme de lumière infrarouge. La caméra est alimentée par une batterie 12 V et capture ces images et les transmet au récepteur connecté à un téléviseur. Les images sont converties en signaux numériques par l'unité d'émission et l'unité de réception reçoit ces signaux numériques et les reconvertit en images et ces images ou vidéos sont ensuite surveillées et analysées sur une unité de télévision.

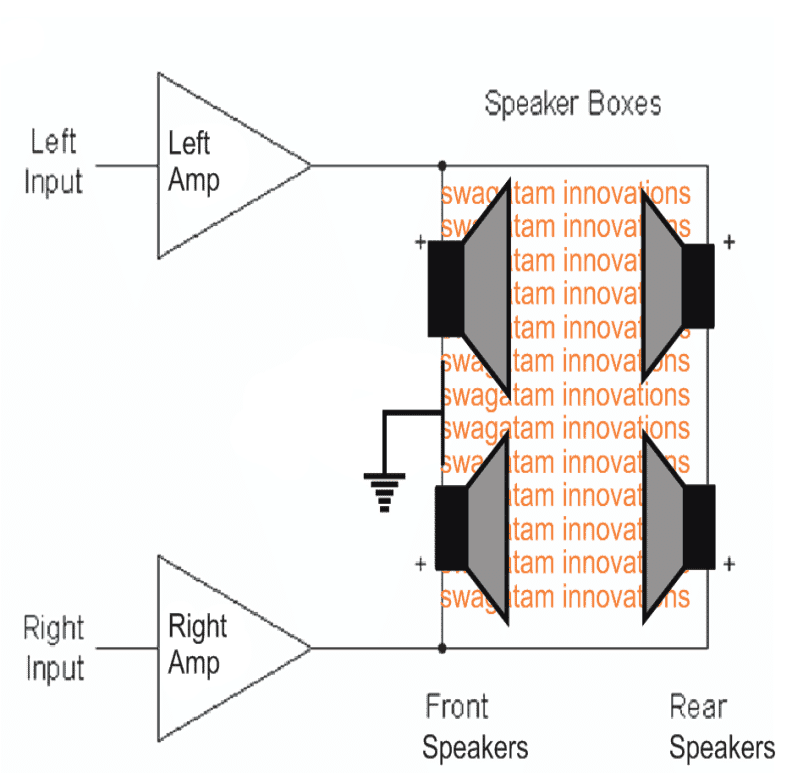
Schéma fonctionnel montrant le fonctionnement de base du robot avec une caméra de vision nocturne
Contrôle du robot d'espionnage War Field
L'ensemble du contrôle du robot se fait à distance. Il se compose d'une section émetteur qui transmet les informations requises à la section récepteur. Le robot est simplement couvert en appuyant sur quelques boutons du côté de l'émetteur.

Schéma fonctionnel montrant un robot d'espionnage de champ émetteur de guerre
L'unité émettrice se compose d'un codeur qui reçoit une entrée de données parallèle du microcontrôleur via les boutons poussoirs et transmet ces données parallèles au format série via le module RF. En appuyant sur le bouton poussoir respectif, le microcontrôleur est programmé pour envoyer les signaux pertinents au codeur sous forme parallèle. Le codeur convertit ces signaux parallèles en forme série à transmettre par le module RF. Ces données série sont modulées avec un signal porteur à l'aide d'un émetteur RF et constituent l'émetteur. Par exemple, si nous appuyons sur le bouton gauche, le microcontrôleur envoie la commande à l'unité de réception via l'encodeur et le module RF.

Schéma fonctionnel montrant le robot d'espionnage sur le terrain du récepteur de guerre
L'unité de réception se compose d'un module récepteur RF qui démodule le signal reçu et d'un décodeur qui reçoit les données série via le module récepteur RF et les convertit sous forme parallèle. Le microcontrôleur utilise ces données pour donner un signal de commande approprié au circuit intégré de commande du moteur afin de contrôler le fonctionnement des deux moteurs. Ainsi, le robot peut être déplacé vers l'avant ou vers l'arrière en contrôlant le moteur, tandis que la caméra fait son travail simultanément.
Robots dans l'armée
Maintenant que nous avons eu une brève idée du robot de champ de guerre, faisons un bref rappel des robots pratiques en défense.
L'une des caractéristiques de base des robots utilisés dans les opérations militaires est qu'ils ne sont pas complètement automatiques. Ils sont en fait contrôlés à distance par des êtres humains. Les robots ou machines sans pilote comme on les appelle peuvent être n'importe quel objet en mouvement ou un avion volant équipé de tous les équipements nécessaires comme des capteurs, des LIDARS (Laser-based Communication RADARS), des caméras, etc. territoires.
Il existe 3 types de machines sans pilote utilisées dans les opérations militaires:
- Véhicule terrestre sans pilote (UGV): Ils sont utilisés à des fins terrestres. Ils peuvent porter une charge lourde, se déplacer sur des terrains accidentés et être équipés de divers capteurs et caméras.

UGV tactique de gladiateur
- Véhicule aérien sans pilote (UAV): Ils sont utilisés pour transporter des armes aériennes et sont essentiellement des machines volantes.

Véhicule aérien sans pilote MQ-9 Reaper
- Véhicule sous-marin sans pilote (UUV): Ce sont essentiellement des sous-marins ou des machines capables de surveiller sous l'eau.

Talisman UUV
Maintenant que nous avons une connaissance du robot de champ de guerre, passons à la tâche de savoir à propos de l'utilisation de la robotique dans les opérations militaires de notre pays et comment notre organisation de défense progresse-t-elle dans ce domaine?
Crédits photo:
- Gladiator UGV tactique par wikimedia
- Véhicule aérien sans pilote MQ-9 Reaper par wikimedia
- Talisman UUV par ingénieur garage



{kind=link}
{kind=link}