Une machine électrique qui convertit l'énergie électrique en énergie mécanique est appelé un moteur électrique. Le moteur électrique est avant tout un simple appareil électrostatique créé par le moine écossais Andrew Gordon dans les années 1740. Mais en 1821, Michael Faraday a démontré la conversion de l'énergie électrique en énergie mécanique.
Les moteurs électriques sont principalement classés en deux catégories: les moteurs à courant alternatif et Moteurs à courant continu . Encore une fois, chaque catégorie est subdivisée en plusieurs types. De nombreuses charges telles que le mélangeur, le broyeur, les ventilateurs, etc., les appareils ménagers les plus fréquemment utilisés dans lesquels on peut trouver différents types de moteurs et ceux-ci peuvent être actionnés à différentes vitesses avec un contrôle de vitesse des moteurs. Dans cet article, nous allons discuter de l'un des principaux types de moteurs à courant continu, à savoir Moteur pas à pas et son contrôle en utilisant le microcontrôleur.
Moteur pas à pas
Un synchrone et moteur à courant continu sans balais qui convertit les impulsions électriques en mouvements mécaniques et donc, tourne pas à pas avec un certain angle entre chaque étape pour effectuer une rotation complète est appelé moteur pas à pas. L'angle entre les étapes de rotation du moteur pas à pas est appelé l'angle pas à pas du moteur.

Moteur pas à pas
Les moteurs pas à pas sont classés en deux types en fonction de leur enroulement: les moteurs pas à pas unipolaires et les moteurs pas à pas bipolaires. Le moteur pas à pas unipolaire est fréquemment utilisé dans de nombreuses applications en raison de sa facilité d'utilisation par rapport au moteur pas à pas bipolaire. Mais il existe différents types de moteurs pas à pas tels que le moteur pas à pas à aimant permanent, le moteur pas à pas à réluctance variable et le moteur pas à pas hybride.
Contrôle du moteur pas à pas
Le moteur pas à pas peut être contrôlé avec diverses techniques, mais ici nous discutons de la commande du moteur pas à pas à l'aide d'un Microcontrôleur Atmega . Le 89C51 est un microcontrôleur du Famille de microcontrôleurs 8051 .

Schéma fonctionnel de la commande de moteur pas à pas
Le schéma de principe d'une commande de moteur pas à pas utilisant un microcontrôleur 8051 est illustré dans la figure avec source de courant , microcontrôleur, moteur pas à pas et blocs de commande.
2 méthodes pour concevoir un circuit de commande de moteur pas à pas
Le contrôleur de moteur pas à pas est conçu utilisant 8051 microcontrôleurs et un circuit de commutation pour commander la vitesse du moteur pas à pas. Le circuit du commutateur de commande peut être conçu en utilisant commutateurs à transistors ou en utilisant un circuit intégré de contrôleur de moteur pas à pas tel que ULN2003 à la place des transistors.
1. Circuit de commande utilisant un circuit intégré de contrôleur de moteur pas à pas
Le moteur pas à pas unipolaire peut être mis en rotation en alimentant les bobines du stator dans une séquence. La séquence de ces signaux de tension appliqués à travers les bobines ou les conducteurs du moteur est suffisante pour entraîner le moteur et, par conséquent, aucun circuit d'attaque n'est nécessaire pour contrôler la direction du courant dans les bobines du stator.

Commande de moteur pas à pas utilisant IC
Le moteur pas à pas biphasé se compose de quatre fils d'extrémité connectés aux bobines et de deux fils communs connectés aux deux fils d'extrémité pour former deux phases. Les points communs et les points d'extrémité des deux phases sont connectés respectivement à la masse ou Vcc et les broches du microcontrôleur. Pour faire tourner le moteur, les extrémités des deux phases doivent être mises sous tension. Principalement, une tension est appliquée au premier point final de la phase1, et une tension supplémentaire est appliquée au premier point final de la phase2, et ainsi de suite.
Le moteur pas à pas peut être utilisé dans différents modes tels que le mode pas à pas Wave Drive, le mode pas à pas à entraînement complet et le mode à pas à demi-entraînement.
Mode pas à pas Wave Drive
En répétant la séquence ci-dessus, le moteur peut être mis en rotation en mode pas à pas d'entraînement par ondes, soit dans le sens des aiguilles d'une montre, soit dans le sens inverse des aiguilles d'une montre en fonction de la sélection des points d'extrémité. Le tableau ci-dessous montre la séquence de phase du signal pour le mode pas à pas d'entraînement d'onde.


Mode pas à pas Wave Drive
Mode pas à pas d'entraînement complet
La mise sous tension des deux points d'extrémité de phases différentes permet d'obtenir simultanément un mode pas à pas complet. Le tableau montre la séquence de phase du signal pour le mode de progression de l'entraînement complet.


Mode pas à pas d'entraînement complet
Mode pas à pas demi-entraînement
La combinaison des étapes des modes vague et pas à pas complet permet d'obtenir un mode pas à pas demi-entraînement. Ainsi, dans ce mode, l'angle de pas est divisé en deux. Le tableau montre la séquence de phase du signal d'un mode pas à pas demi-entraînement.


Mode pas à pas demi-entraînement
En général, l'angle de pas dépend de la résolution du moteur pas à pas. La taille des pas et le sens de rotation sont directement proportionnels au nombre et à l'ordre de la séquence d'entrée. La vitesse de rotation de l'arbre dépend de la fréquence de la séquence d'entrée. Le couple et le nombre d'aimants magnétisés à la fois sont proportionnels.
Le moteur pas à pas nécessite un courant de 60 mA, mais le courant nominal maximal du microcontrôleur Atmega AT89C51 est de 50 mA. Ainsi, un contrôleur de moteur pas à pas IC est utilisé pour interfacer le moteur pas à pas avec le microcontrôleur pour transférer les signaux.
2. Circuit de commutateur de commande utilisant des transistors
L'alimentation électrique du circuit peut être donnée en abaissant la tension de 230V à 7,5V à l'aide d'un transformateur abaisseur, puis redressement par un pont redresseur à diodes . Cette sortie redressée est envoyée à un condensateur de filtrage, puis passée à travers le régulateur de tension. La sortie régulée 5V est obtenue à partir du régulateur de tension. La broche de réinitialisation 9 est connectée entre le condensateur et la résistance.

Circuit de commande de moteur pas à pas utilisant un transistor
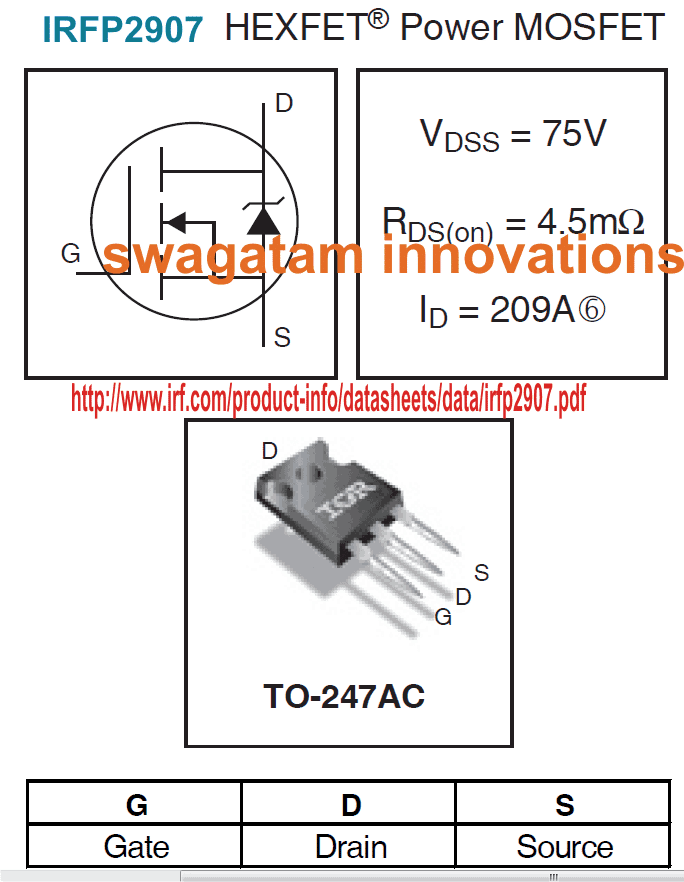
En général, le moteur pas à pas se compose de quatre bobines, comme indiqué sur la figure. Ainsi, pour entraîner le moteur, quatre circuits de commande de moteur sont nécessaires. Au lieu d'utiliser le circuit intégré de commande de moteur pas à pas pour piloter le moteur, quatre transistors sont connectés en tant que circuits d'attaque à 21, 22, 23 et 24 broches du microcontrôleur, respectivement.
Si les transistors commencent la conduction, un champ magnétique sera alors créé autour de la bobine provoquant la rotation du moteur. La vitesse du moteur pas à pas est directement proportionnelle à la fréquence d'impulsion d'entrée. Un oscillateur à cristal est connecté aux broches 18 et 19 pour fournir une fréquence d'horloge du microcontrôleur d'environ 11,019 MHz.
Le temps d'exécution de toute instruction peut être calculé à l'aide de la formule ci-dessous
Heure = ((C * 12)) / f
Où C = numéro du cycle
Et F = fréquence du cristal
L'un des circuits basés sur l'application qui utilise un moteur pas à pas pour faire tourner le panneau solaire est décrit ci-dessous.
Commande de moteur pas à pas à l'aide du microcontrôleur 8051 programmé
Projet de panneau solaire Sun Tracking est destiné à générer le maximum d'énergie en ajustant automatiquement le panneau solaire. Dans ce projet, un moteur pas à pas contrôlé par un microcontrôleur programmé de la famille 8051 est interfacé au panneau solaire pour maintenir la face des panneaux solaires toujours perpendiculaire au soleil.

Contrôle du moteur pas à pas à l'aide d'un microcontrôleur par Edgefxkits.com
Le microcontrôleur programmé génère des impulsions électriques échelonnées à intervalles réguliers vers le moteur pas à pas pour faire tourner le panneau solaire. Le circuit intégré de pilotage est utilisé pour entraîner le moteur pas à pas car le contrôleur n'est pas en mesure de fournir les besoins en puissance du moteur.
Veuillez laisser vos suggestions, commentaires et questions en publiant des commentaires dans la section des commentaires ci-dessous. Nous ferons de notre mieux pour vous aider techniquement concernant cet article et développer des projets électriques et électroniques en utilisant le moteur pas à pas.