Ce circuit de bras robotisé qui peut également être implémenté comme une grue robotisée, fonctionne à l'aide de 6 servomoteurs et peut être contrôlé par un télécommande à microcontrôleur , en utilisant une liaison de communication 2,4 GHz basée sur Arduino.
Caractéristiques principales
Lorsque vous construisez quelque chose d'aussi sophistiqué qu'un bras robotique, il doit avoir l'air moderne et inclure de nombreuses fonctionnalités avancées, et pas seulement un simple jouet comme des fonctions.
La conception à part entière proposée est relativement facile à construire, mais elle est attribuée à certaines fonctions de manœuvre avancées, qui pourraient être contrôlées avec précision par des commandes sans fil ou télécommandées. La conception est même compatible pour une utilisation industrielle, si les moteurs sont convenablement améliorés.
Les principales caractéristiques de cette grue mécanique comme le bras robotique sont:
- «Bras» réglable en continu sur un axe vertical de 180 degrés.
- «Coude» réglable en continu sur un axe vertical de 180 degrés.
- «Pincement de doigt» ou Grip réglable en continu sur un axe vertical de 90 degrés.
- «Bras» réglable en continu sur un plan horizontal de 180 degrés.
- L'ensemble du système robotique ou le bras de la grue est mobile et maniable comme un voiture télécommandée .
Simulation de travail approximatif
Les quelques-unes des fonctionnalités expliquées ci-dessus peuvent être visualisées et comprises à l'aide de la simulation GIF suivante:

Positions du mécanisme moteur
La figure suivante nous donne une image claire des différentes positions du moteur et des mécanismes d'engrenages associés qui doivent être installés pour la mise en œuvre du projet:

Dans cette conception, nous nous assurons de garder les choses aussi simples que possible afin que même un profane soit capable de comprendre les mécanismes moteur / engrenage impliqués. et rien ne reste caché derrière des mécanismes complexes.
Le fonctionnement ou la fonction de chaque moteur peut être compris à l'aide des points suivants:
- Le moteur n ° 1 contrôle le «pincement des doigts» ou le système de préhension du robot. L'élément mobile est directement articulé avec l'arbre du moteur pour les mouvements.
- Le moteur n ° 2 contrôle le mécanisme coudé du système. Il est configuré avec un simple système d'engrenage bord à egde pour la mise en œuvre du mouvement de levage.
- Le moteur n ° 3 est chargé de soulever verticalement tout le système de bras robotique, ce moteur doit donc être plus puissant que les deux ci-dessus. Ce moteur est également intégré à l'aide d'un mécanisme d'engrenages pour fournir les actions requises.
- Le moteur n ° 4 contrôle l'ensemble du mécanisme de la grue sur un plan horizontal complet de 360 degrés, de sorte que le bras puisse prendre ou soulever n'importe quel objet à l'intérieur sens horaire ou anti-horaire gamme radiale.
- Les moteurs 5 et 6 agissent comme des roues pour la plate-forme qui porte tout le système. Ces moteurs peuvent être contrôlés en déplaçant le système d'un endroit à un autre sans effort, et cela facilite également le mouvement est / ouest, nord / sud du système simplement en ajustant les vitesses des moteurs gauche / droite. Cela se fait simplement en réduisant ou en arrêtant l'un des deux moteurs, par exemple pour initier un virage du côté droit, le moteur du côté droit peut être arrêté ou arrêté jusqu'à ce que le virage soit exécuté complètement ou à l'angle souhaité. De même, pour amorcer un virage à gauche, faites de même avec le moteur gauche.
La roue arrière n'a pas de moteur associé, elle est articulée pour se déplacer librement sur son axe central et suivre les manœuvres de la roue avant.
Le circuit du récepteur sans fil
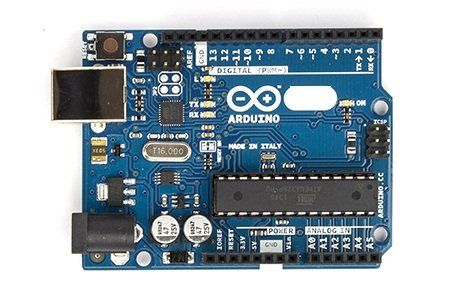
Puisque l'ensemble du système est conçu pour fonctionner avec une télécommande, un récepteur sans fil doit être configuré avec les moteurs expliqués ci-dessus. Et cela peut être fait en utilisant le circuit basé sur Arduino suivant.

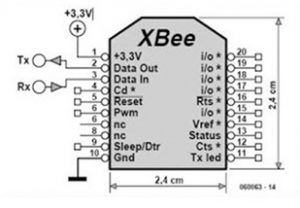
Comme vous pouvez le voir, il y a 6 servomoteurs attachés aux sorties Arduino et chacun d'entre eux est contrôlé par les signaux télécommandés capturés par le capteur NRF24L01 attaché.
Les signaux sont traités par ce capteur et transmis à l'Arduino qui délivre le traitement au moteur concerné pour les opérations de contrôle de vitesse prévues.
Ces signaux sont envoyés depuis un circuit émetteur doté de potentiomètres. Le dispositif de réglage de ces potentiomètres contrôle les niveaux de vitesse sur les moteurs correspondants attachés avec le circuit récepteur expliqué ci-dessus.
Voyons maintenant à quoi ressemble le circuit de l'émetteur:
Module émetteur

La conception de l'émetteur peut être vue avec 6 potentiomètres attachés avec sa carte Arduino et également avec un autre dispositif de liaison de communication 2,4 GHz.
Chacun des pots est programmé pour commander un moteur correspondant associé au circuit récepteur. Par conséquent, lorsque l'utilisateur fait tourner l'arbre d'un potentiomètre sélectionné de l'émetteur, le moteur correspondant du bras robotique commence à se déplacer et à mettre en œuvre les actions en fonction de sa position spécifique sur le système.
Contrôle de la surcharge du moteur
Vous vous demandez peut-être comment les moteurs limitent-ils leur mouvement sur leurs plages mobiles, puisque le système ne dispose d'aucun dispositif de limitation pour empêcher le moteur de se surcharger une fois que les mouvements du mécanisme respectif atteignent leur point d'arrivée?
Cela signifie, par exemple, que se passe-t-il si le moteur n'est pas arrêté même après que la «poignée» a tenu fermement l'objet?
La solution la plus simple consiste à ajouter des modules de contrôle de courant avec chacun des moteurs de sorte que dans de telles situations, le moteur reste allumé et verrouillé sans brûler ni surcharger.
En raison d'un contrôle de courant actif, les moteurs ne subissent pas de surcharge ou de surintensité, et ils continuent de fonctionner dans une plage de sécurité spécifiée.
Le code de programme complet peut être trouvé dans cet article
Précédent: Amplificateur audio USB 5V pour haut-parleurs PC Un article: 7 circuits onduleurs sinusoïdaux modifiés explorés - 100W à 3kVA