Ce circuit intégré de contrôleur de moteur sans balais (BLDC) polyvalent est conçu pour contrôler tout moteur BLDC triphasé à haute tension, à courant élevé et à effet Hall souhaité avec une précision et une sécurité extrêmes. Apprenons les détails en profondeur.

Utilisation de l'IC MC33035
Le `` héros '' du circuit est le contrôleur à puce unique MC33035 qui est un module IC haute performance de deuxième génération, doté de toutes les fonctions actives requises qui peuvent être nécessaires pour exécuter la plupart des BLDC à courant élevé, haute tension, triphasé ou quadriphasé. moteurs avec une configuration en boucle ouverte ou en boucle fermée.

Le circuit intégré est équipé d'un décodeur de position du rotor pour permettre un séquençage précis de la commutation, d'une référence compensée en température pour faciliter la tension correcte du capteur, d'un oscillateur en dents de scie à fréquence programmable, de trois étages de commande côté haut à collecteur ouvert intégré et de trois totems à courant élevé pilotes de type low-side, spécialement conçus pour faire fonctionner un étage de contrôleur de moteur mosfet haute puissance à pont en H triphasé.
La puce est également renforcée en interne avec des fonctionnalités de protection haut de gamme et des étapes de contrôle infaillibles telles que le verrouillage de sous-tension, la limitation du courant cycle par cycle grâce à une option d'arrêt à verrouillage à retard réglable, à l'arrêt à haute température du circuit intégré interne et à une conception exclusive brochage de sortie de défaut qui peut être interfacé avec un MCU pour un traitement avancé préféré et des retours.
Les fonctions typiques qui peuvent être exécutées avec ce circuit intégré sont la commande de vitesse en boucle ouverte, la commande de sens inverse avant, la «validation de marche», une fonction de freinage dynamique d'urgence.
Le circuit intégré est conçu pour fonctionner avec des capteurs de moteur ayant des phases de 60 à 300 degrés ou de 120 à 240 degrés, en prime, le circuit intégré peut également être utilisé pour contrôler les moteurs à balais traditionnels.
Comment fonctionne l'IC
Le MC33035 fait partie de plusieurs contrôleurs de moteur sans balais monolithiques à haute efficacité créés par Motorola .
Il est composé à peu près des capacités nécessaires pour lancer un système de contrôle de moteur triphasé ou quadriphasé complet, en boucle ouverte.
En outre, le contrôleur peut être réalisé pour contrôler les moteurs à balais CC. Conçu avec la technologie analogique bipolaire, il offre un niveau supérieur d'efficacité et de durabilité dans un environnement industrialisé impitoyable.
Le MC33035 comporte un décodeur de position de rotor pour un séquençage de commutation précis, une référence d'environnement remboursée compétente pour fournir une puissance de capteur, un oscillateur en dents de scie programmable en fréquence, un amplificateur d'erreur entièrement accessible, un comparateur de modulateur de largeur d'impulsion, 3 sorties d'entraînement supérieures à collecteur ouvert et 3 Sorties d'attaque inférieures du totem à courant élevé parfaites pour les MOSFET de puissance de fonctionnement.
Le MC33035 comprend des capacités de blindage qui incluent un verrouillage de sous-tension, une limitation du courant cycle par cycle avec un mode d'arrêt verrouillé à retard sélectionnable, un arrêt thermique intégré, ainsi qu'une sortie de défaut exclusive qui sera commodément connectée à un contrôleur de microprocesseur.
Les attributs de contrôle moteur standard incluent le contrôle de vitesse en boucle ouverte, la rotation avant ou arrière, la validation de marche et le freinage dynamique. En plus de cela, le MC33035 a une broche de sélection 60 ° / 120 ° qui configure le décodeur de situation du rotor pour les entrées de mise en phase électrique du capteur 60 ° ou 120 °.

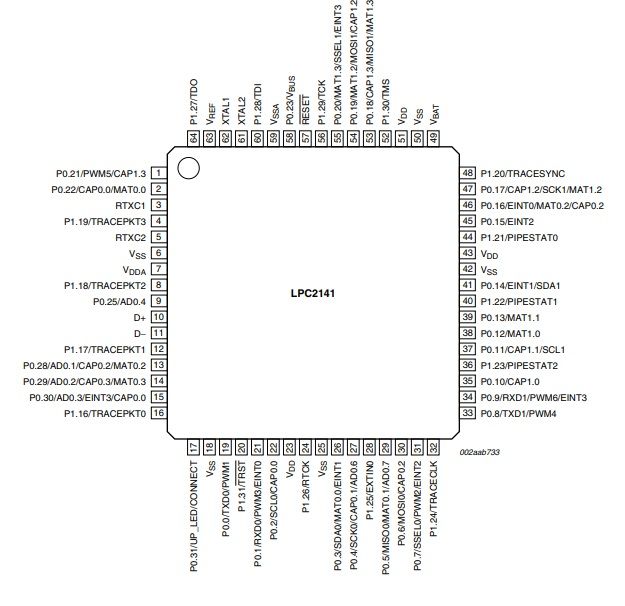
Fonctions PIN OUT:
Pin1, 2, 24 (Bt, At, Ct) = Il s'agit des trois sorties d'entraînement supérieures du CI spécifié pour faire fonctionner les dispositifs d'alimentation configurés en externe tels que les BJT. Ces broches sont configurées en interne en mode collecteur ouvert.
Broche n ° 3 (Fwd, Rev) = Ce brochage est destiné à être utilisé pour contrôler le sens de rotation du moteur.
Broche n ° 4, 5, 6 (Sa, Sb, Sc) = Ce sont 3 sorties de capteur du circuit intégré affectées à la commande de la séquence de commande du moteur.
Pin # 7 (sortie activée) = Cette broche du circuit intégré est affectée pour permettre le fonctionnement du moteur tant qu'une logique haute est maintenue ici, tandis qu'une logique basse sert à activer une roue libre du moteur.
Broche n ° 8 (sortie de référence) = Cette broche est activée avec un courant d'alimentation pour charger le condensateur de synchronisation de l'oscillateur Ct ainsi que pour fournir un niveau de référence pour l'amplificateur d'erreur. Il peut également être utilisé pour fournir une alimentation aux circuits intégrés des capteurs à effet Hall du moteur.
Broche n ° 9 (entrée non inverseuse de détection de courant) : La sortie de signal de 100 mV peut être obtenue à partir de ce brochage en référence à la broche n ° 15 et est utilisée pour annuler la conduction du commutateur de sortie pendant un cycle d'oscillateur spécifié. Ce brochage se connecte normalement avec le côté supérieur de la résistance de détection de courant.
Broche n ° 10 (oscillateur) : Ce brochage détermine la fréquence de l'oscillateur pour l'IC à l'aide du réseau RC Rt et Ct.
Broche n ° 11 (entrée non inverseuse de l'amplificateur d'erreur) : Ce brochage est utilisé avec le potentiomètre de contrôle de vitesse.
Broche n ° 12 (erreur d'entrée d'inversion d'ampli) : Cette broche est connectée en interne avec la sortie d'ampli d'erreur mentionnée ci-dessus pour activer les applications en boucle ouverte .
Broche n ° 13 (sortie ampère d'erreur / entrée PWM) : La fonction de ce brochage est de fournir une compensation pendant les applications en boucle fermée.
Pin # 14 (sortie de défaut) : Cette sortie d'indicateur de défaut peut devenir une logique active basse pendant quelques conditions critiques telles que: Code d'entrée invalide pour le capteur, Activer le brochage alimenté avec une logique zéro, Brochage d'entrée de détection de courant supérieur à 100 mV (@ pin9 avec référence à la broche 15) , déclenchement du blocage de sous-tension ou d'une situation d'arrêt thermique).
Broche n ° 15 (entrée inverseuse de détection de courant) : Cette broche est définie pour fournir le niveau de référence pour le seuil interne de 100 mV, et peut être vue connectée à la résistance de détection de courant du côté inférieur.
Broche n ° 16 (GND) : Il s'agit de la broche de masse du circuit intégré et est conçue pour fournir le signal de masse au circuit de commande et doit être référencée à la masse de la source d'alimentation.
Broche n ° 17: (Vcc) : Il s'agit de la broche positive d'alimentation spécifiée pour fournir la tension positive au circuit de commande du circuit intégré. La plage minimale de fonctionnement de cette broche est de 10V et la plage maximale de 30V.
Broche n ° 18 (Vc) : Ce brochage définit l'état haut (Voh) pour les sorties inférieures du variateur via la puissance attribuée à cette broche. La scène fonctionne avec la gamme de 10 à 30V.
Broche # 19, 20, 21 (Cb, Bb, Ab) : Ces trois broches sont disposées en interne sous la forme de sorties de mât totémique et sont affectées pour piloter les dispositifs de puissance de sortie inférieurs du variateur.
Pin # 22 (sélection de déphasage 60 D, 120D) : L'état attribué à ce brochage configure le fonctionnement du circuit de commande avec les capteurs à effet Hall pour des entrées d'angle de phase de 60 degrés (logique haute) ou 120 degrés (logique basse).
Broche # 23 (frein) : Une logique basse à ce brochage permettra au moteur BLDC de fonctionner sans à-coups tandis qu'une logique haute arrêtera instantanément le fonctionnement du moteur par une décélération rapide.
MODE D'EMPLOI
Un schéma fonctionnel interne représentatif est illustré dans la figure ci-dessus. Un discours sur les avantages et le fonctionnement de chacun des blocs centraux énumérés ci-dessous.
Décodeur de position du rotor
Un décodeur de position du rotor interne mesure les 3 entrées de capteur (broches 4, 5, 6) pour rendre le bon séquencement des broches d'entraînement supérieur et inférieur. Les entrées de capteur sont fabriquées pour s'interfacer directement avec des commutateurs à effet Hall de type collecteur ouvert ou des coupleurs à fente opto.
Les résistances de tirage intégrées sont classées pour réduire la quantité nécessaire de pièces externes. Les entrées sont compatibles TTL, avec leurs seuils typiquement à 2,2 V.
La gamme de circuits intégrés MC33035 est destinée à contrôler des moteurs triphasés et à fonctionner avec 4 des conventions les plus courantes de mise en phase des capteurs. Une sélection 60 ° / 120 ° (broche 22) est fournie de manière appropriée et permet au MC33035 de se configurer seul pour réguler les moteurs ayant un phasage de capteur électrique à 60 °, 120 °, 240 ° ou 300 °.
Avec 3 entrées de capteur, vous découvrirez 8 formations de code d'entrée potentielles, dont 6 sont des placements de rotor légitimes.
Les deux autres codes sont obsolètes car ils résultent généralement d'une connexion de capteur ouverte ou en court-circuit.
Avec 6 codes d'entrée justifiables, le décodeur peut éventuellement prendre en charge la position du rotor du moteur dans un spectre de 60 degrés électriques.
L'entrée avant / arrière (broche 3) est utilisée comme un outil pour modifier le cours du programme du moteur en inversant la tension à travers l'enroulement du stator.
Dès que l'entrée change d'état, de haut en bas en utilisant un code de programme d'entrée de capteur attribué (par exemple 100), les sorties du variateur supérieur et de base utilisant le même état alpha sont permutées (AT vers AB, BT vers BB, CT vers CB).
Essentiellement, la chaîne variable change de direction et le moteur inverse la séquence directionnelle. La commande marche / arrêt du moteur est obtenue par l'activation de la sortie (broche 7).
Lorsqu'elle est laissée déconnectée, une alimentation en courant interne de 25 μA permet de séquencer les sorties principales et de base du variateur. Lorsqu'elles sont mises à la terre, les sorties du variateur de la partie supérieure sont désactivées et les variateurs de base sont poussés au bas, ce qui évoque le moteur en roue libre et la sortie de défaut au déclenchement.
Le freinage moteur dynamique permet de développer une marge de protection excédentaire dans le dispositif final. Le système de freinage est obtenu en plaçant votre entrée de frein (broche 23) dans un état supérieur.
Cela amène les sorties supérieures du variateur à s'éteindre et les sous-entraînements à s'activer, court-circuitant à nouveau l'EMF généré par le moteur. L'entrée de frein possède une considération absolue et sans réserve sur toutes les autres entrées. La résistance de pull-up interne de 40 kΩ s'interface à l'aide du commutateur de sécurité du programme en garantissant l'activation du frein en cas d'ouverture ou de coupure.
La table de vérité de la logique de commutation est présentée ci-dessous. Une porte NOR à 4 entrées est utilisée pour examiner l'entrée de frein et les entrées des 3 BJT de sortie d'entraînement supérieurs.

L'objectif est généralement de désactiver le freinage avant que les sorties supérieures du variateur n'atteignent un état haut. Cela vous permet d'éviter la location synchronisée des interrupteurs d'alimentation supérieur et de base.
Dans les programmes d'entraînement à moteur demi-onde, les composants d'entraînement supérieurs ne sont généralement pas nécessaires et ils sont dans la plupart des cas maintenus détachés. Avec ces types de circonstances, le freinage sera toujours atteint parce que la porte NOR détecte la tension de base vers les BJT de sortie du variateur supérieur.
Amplificateur d'erreur
Un amplificateur d'erreur entièrement compensé à efficacité améliorée avec un accès actif à chaque entrée et sortie (broches # 11, 12, 13) est proposé pour aider à l'exécution de la commande de vitesse du moteur en boucle fermée.
L'amplificateur est livré avec un gain de tension CC standard de 80 dB, une bande passante de gain de 0,6 MHz, ainsi qu'une large plage de tension d'entrée en mode commun qui s'étend de la terre à Vref.
Dans la majorité des programmes de contrôle de vitesse en boucle ouverte, l'amplificateur est configuré comme un suiveur de tension à gain unitaire avec l'entrée non inverseuse couplée à l'alimentation en tension de réglage de vitesse.
Oscillateur La fréquence de l'oscillateur à rampe interne est câblée à travers les valeurs décidées pour les éléments de temporisation RT et CT.
Le condensateur CT sera chargé via la sortie de référence (broche 8) au moyen de la résistance RT et déchargé via un transistor de décharge interne.
Les tensions de crête et de fosse de la rampe sont normalement de 4,1 V et 1,5 V en conséquence. Pour offrir un aperçu décent du bruit audible et des performances de commutation de sortie, une fréquence d'oscillateur dans la sélection de 20 à 30 kHz est suggérée. Reportez-vous à la figure 1 pour la sélection des composants.
Modulateur de largeur d'impulsion
La modulation de largeur d'impulsion intégrée offre une approche efficace de la régulation de la vitesse du moteur en modifiant la tension standard attribuée à chaque enroulement de stator dans toute la série de commutation.
Au fur et à mesure que le TC se décharge, l'oscillateur modélise chacun des verrous, permettant la conduction des sorties du variateur supérieur et inférieur. Le comparateur PWM réinitialise le verrou supérieur, mettant fin à la location de sortie d'entraînement inférieure une fois que la rampe positive de CT se transforme en excès du résultat de l'amplificateur d'erreur.
Le chronogramme du modulateur de largeur d'impulsion est illustré à la figure 21.
La modulation de largeur d'impulsion pour la gestion de la vitesse se présente exclusivement aux sorties inférieures du variateur. Limite de courant Le fonctionnement constant d'un moteur qui peut être considérablement surchargé entraîne une surchauffe et un dysfonctionnement inévitable.
Cette situation préjudiciable peut facilement être évitée au mieux avec l'utilisation de la restriction de courant cycle par cycle.
Autrement dit, chaque on-cycle est traité comme étant une fonction indépendante. La restriction de courant cycle par cycle est obtenue en suivant l'accumulation de courant du stator chaque fois qu'un commutateur de sortie se déclenche, et après avoir détecté une situation de courant élevé, désactivant instantanément le commutateur et le maintenant éteint pendant la période exceptionnelle de l'intervalle de montée en puissance de l'oscillateur.
Le courant du stator est transformé en une tension en appliquant une résistance de détection référencée à la masse RS (figure 36) en ligne avec les 3 transistors de commutation de la partie inférieure (Q4, Q5, Q6).
La tension établie le long de la résistance d'anticipation est supervisée par l'entrée de détection de courant (broches 9 et 15) et comparée au point de référence interne de 100 mV.
Les entrées du comparateur de détection de courant sont livrées avec une plage de mode commun d'entrée d'environ 3,0 V.
Si la tolérance de détection de courant de 100 mV est dépassée, le comparateur réinitialise le verrouillage de détection inférieur et met fin à la conduction du commutateur de sortie. La valeur de la résistance de détection de courant est en fait:
Rs = 0,1 / Istateur (max)
La sortie de défaut démarre dans une situation d'intensité élevée. Le réglage PWM à double verrouillage garantit qu'une seule impulsion de déclenchement de sortie se produit au cours d'une certaine routine d'oscillateur, qu'elle se termine ou non par la sortie de l'amplificateur d'erreur ou du comparateur de limite de courant.
Le régulateur 6,25 V sur puce (broche 8) offre un courant de charge pour le condensateur de synchronisation de l'oscillateur, un point de référence pour l'amplificateur d'erreur, qui lui permet de fournir 20 mA de courant approprié pour alimenter spécifiquement les capteurs dans les programmes basse tension.
Dans des applications de tension plus importantes, cela pourrait devenir important pour échanger la puissance émise par le régulateur hors du circuit intégré. Ceci est certainement réalisé à l'aide d'un autre transistor de passage, comme le montre la figure 22.
Un point de référence de 6,25 V a semblé être décidé pour permettre le rendu du circuit NPN simple, où Vref - VBE surpasse la tension minimale essentielle par les capteurs à effet Hall sur la chaleur.
Avoir un assortiment de transistors approprié et une dissipation thermique suffisante, jusqu'à 1 ampère de courant de charge peut être acheté.
Verrouillage de sous-tension
Un verrouillage de sous-tension à trois voies a été intégré pour réduire les dommages causés au CI et aux transistors de commutation d'alimentation alternatifs. Lors de faibles facteurs d'alimentation, cela garantit que le circuit intégré et les capteurs sont complètement fonctionnels et que la tension de sortie du variateur de base est adéquate.
Les alimentations positives vers le circuit intégré (VCC) et les faibles entraînements (VC) sont chacune examinées par des comparateurs indépendants qui obtiennent leurs seuils à 9,1 V.Cette étape particulière garantit une commutation de porte adéquate requise pour atteindre un faible RDS (activé) chaque fois que la puissance ordinaire est alimentée. Équipement MOSFET.
Chaque fois que vous alimentez directement les capteurs à effet Hall à partir de la référence, un fonctionnement inapproprié du capteur apparaît dans le cas où la tension de sortie du point de référence chute en dessous de 4,5 V.
Un troisième comparateur peut être utilisé pour reconnaître ce problème.
Lorsque plus d'un des comparateurs détecte une situation de sous-tension, la sortie de défaut est activée, les courses supérieures sont désactivées et les sorties du variateur de base sont organisées en un point bas.
Chacun des comparateurs intègre une hystérésis pour se protéger contre les amplitudes lors du pontage de leurs seuils individuels.
Sortie de défaut
La sortie de défaut à collecteur ouvert (broche 14) avait été conçue pour offrir des détails d'analyse en cas de panne du processus. Il a une capacité de courant absorbé de 16 mA et peut spécifiquement piloter une diode électroluminescente pour le signal visible. En outre, il est en fait commodément interfacé avec la logique TTL / CMOS pour une utilisation dans un programme régi par microprocesseur.
La sortie de défaut est efficace à l'état bas alors que plusieurs des situations suivantes se produisent:
1) Codes d'entrée de capteur non valides
2) Activation de la sortie à la logique [0]
3) Entrée de détection de courant supérieure à 100 mV
4) Verrouillage de sous-tension, activation de 1 ou plus des comparateurs
5) Arrêt thermique, température de jonction optimale atteignant le maximum Cette sortie exclusive peut également être utilisée pour distinguer entre le démarrage du moteur ou le fonctionnement enduré dans une situation inondée.
Avec l'aide d'un réseau RC parmi la sortie de défaut et l'entrée d'activation, cela signifie que vous pouvez développer un arrêt verrouillé temporisé en ce qui concerne la surintensité.
Les circuits supplémentaires affichés sur la figure 23 permettent de démarrer sans effort des systèmes de moteur équipés de charges d'inertie plus élevées en offrant un couple de démarrage supplémentaire, tout en protégeant la protection contre les surintensités. Cette tâche est réalisée en plaçant la restriction actuelle sur la valeur supérieure à la valeur minimale pour une période établie. Au cours d'une situation de surintensité extrêmement longue, le condensateur CDLY se chargera, évoquant l'entrée de validation pour franchir sa tolérance à une condition basse.
Un verrou peut maintenant être formé par le cycle de rétroaction positive de la sortie de défaut à l'activation de la sortie. Lorsqu'il est réglé, par l'entrée de détection de courant, il ne peut être réinitialisé qu'en court-circuitant CDLY ou en cyclant les alimentations.
Schéma BLDC haute puissance entièrement fonctionnel
Un circuit de contrôleur BLDC à haute puissance et à courant élevé entièrement fonctionnel utilisant le dispositif expliqué ci-dessus peut être vu ci-dessous, il est configuré en mode pleine onde, triphasé, 6 étapes:

Précédent: Calcul de la tension, du courant dans un inducteur Buck Un article: Faites ce circuit de scooter électrique / pousse-pousse